Introduction
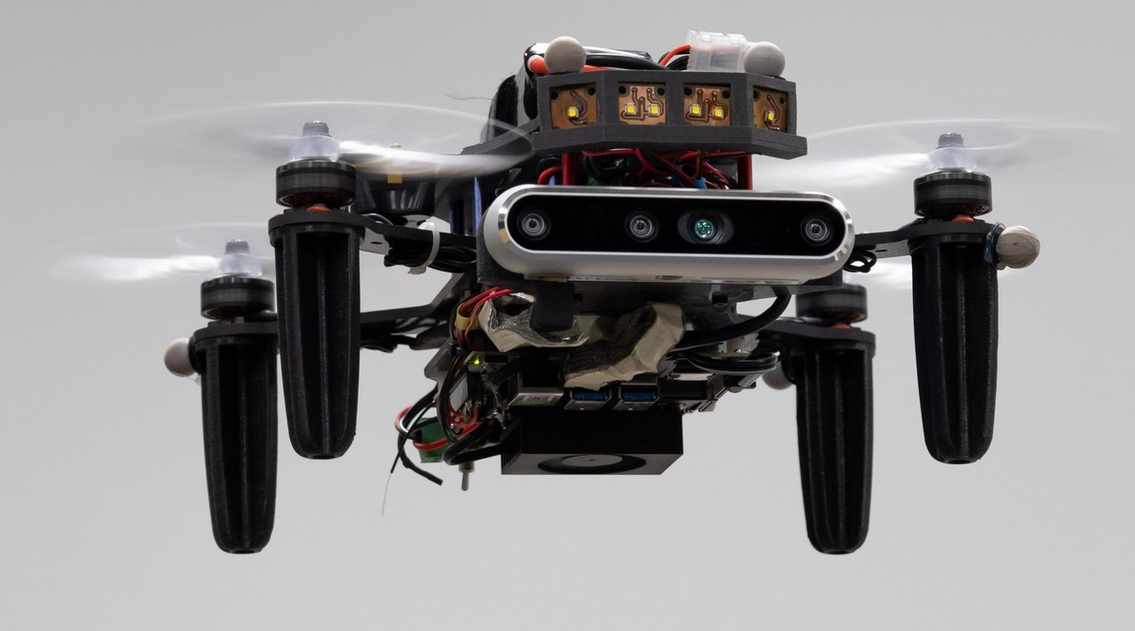
Bienvenue dans la documentation du drone open-source Tirrex. Le but de ce site est de pouvoir réaliser et configurer un drone modulaire et ouvert (OMD) à destination de la recherche. Le modèle 3d suivante présente sa configuration 6-8".
Architecture
L’architecture de drones Tirrex est similaire à la plupart des drones du commerce a l’exception des points suivants :
- Un microcontrôleur ESP32 Xiao C3 qui permet de faire le lien entre le drone et un ordinateur qui fait tourner une commande sous Matlab Simulink ou ROS
- Une conception modulaire permettant de pouvoir installer tout type de composant sur le châssis
- La possibilité d’installer facilement des micro-ordinateurs comme le raspberry pi ou encore une jetson pour du calcul embarqué
- Des Esc qui fonctionnent avec un firmware AM32 remodifié par nos soins et qui permet de faire tourner les moteurs en boucle fermée. Les gains peuvent également êtres ajustés
- Un jumeau numérique sous gazebo ainsi que sur Matlab Simulink
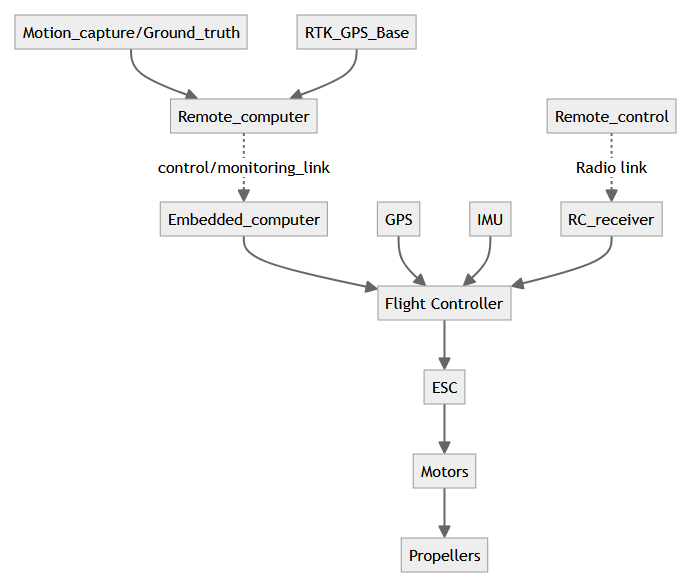
Le système est asser similaire à la pluspart des architectures “recherches” présentes dans les Labos. Un contrôleur de vol fais les calculs bas niveau directement dans le drone. Un ESC custom permet de gérer la vitesse angulaire de chaque moteur avec précision. Une passerelle permet de faire le lien entre le microcontrôleur et un ordinateur au sol permettant le contrôle du drone avec des algorithmes complexes et déportés. Une compatibilité avec un système de motion capture est également réalisée grâce à la passerelle. Le serveur VRPN de la MoCap envoie les informations d’odométrie à la passerelle du drone (ESP32) qui envoie les information via mavlink au FC. Px4 fera le filtrage des données avant de renvoyer les données filtrées dans l’autre sens.
Flotte de drone OMD du GIPSA Lab
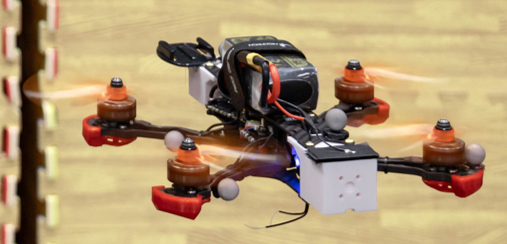
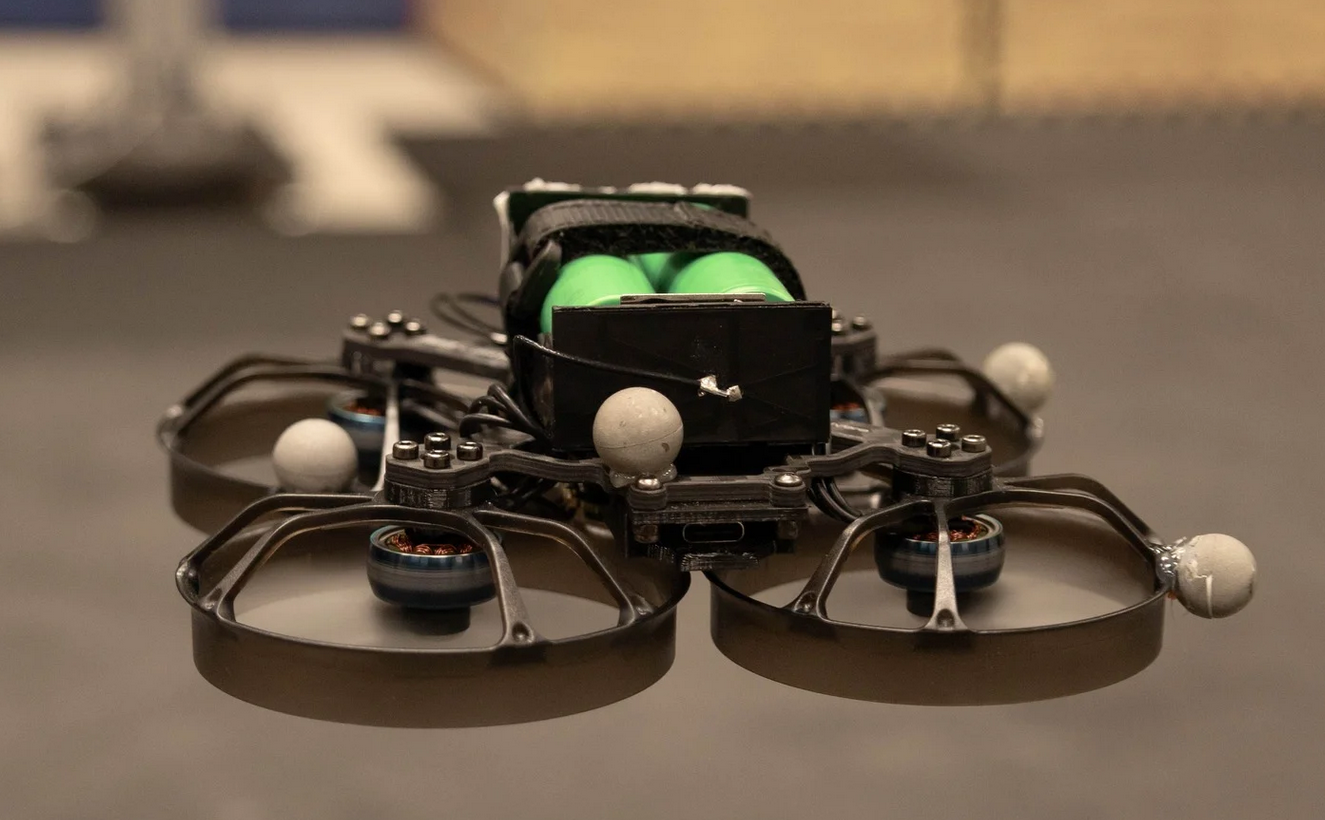
| Caractéristique | OMD-60 / OMD-70 | Secteur 5 | BM42 | OMD-25 “Frelon” | Darknav |
|---|---|---|---|---|---|
| Photo | 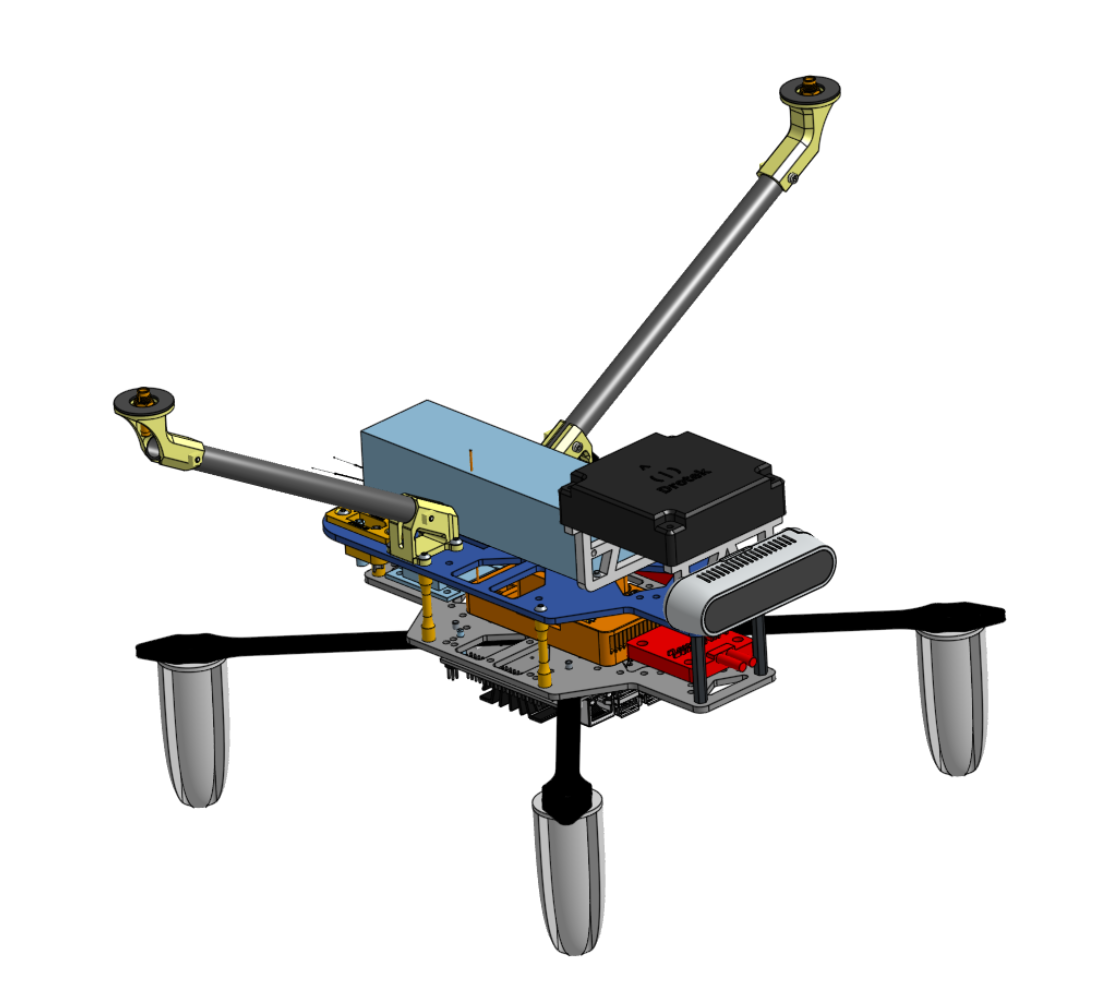 |
 |
 |
 |
 |
| Prix des pièces uniquement (€) | 1500 | 600 | 1750 | 500 | 1500 |
| Masse du drone (g) | 1000 | 1500 | 590 | 246 | 1500 |
| batterie | 4s | 4s | 4s | 2s / 3s li-ion | 4s |
| charge utile transportable | 1500 | 700 | 1200 | 120 | 1200 |
| Taille d’hélice | 6" / 7" | 5" | 6" | 2.5" | 6" |
| autonomie | 8 | 8 | 5 | 5 | 5 |
- OMD Robot Large 5/6/7"
- Secteur5 Robot intermédiaire 5"
- BM42 Robot Large 5/6/7"
- Frelon Micro drone 2.5"
- Darknav Robot Large 5/6/7"
Simulateur
On propose deux simulateurs. Le premier basé simulink pur prend en compte un grand nombre d’éléments comme paramètres à ajouter manuelement. Le deuxuème est un simulateur basé Simscape directement dans Matlab Simulink. Celui-ci permet d’importer une CAO et permet donc de s’affranchir de la mise à jour manuelle des paramètres. Cependant cela implique aussi de paramétrer parfaitement la CAO au préalable.
On propose la procédure pour importer une CAO onshape ici
Montage Drone
Vous souhaitez monter votre propre OMD ? Alors par ici ! Les étapes sont les suivantes :
