Montage Frelon 2.5"
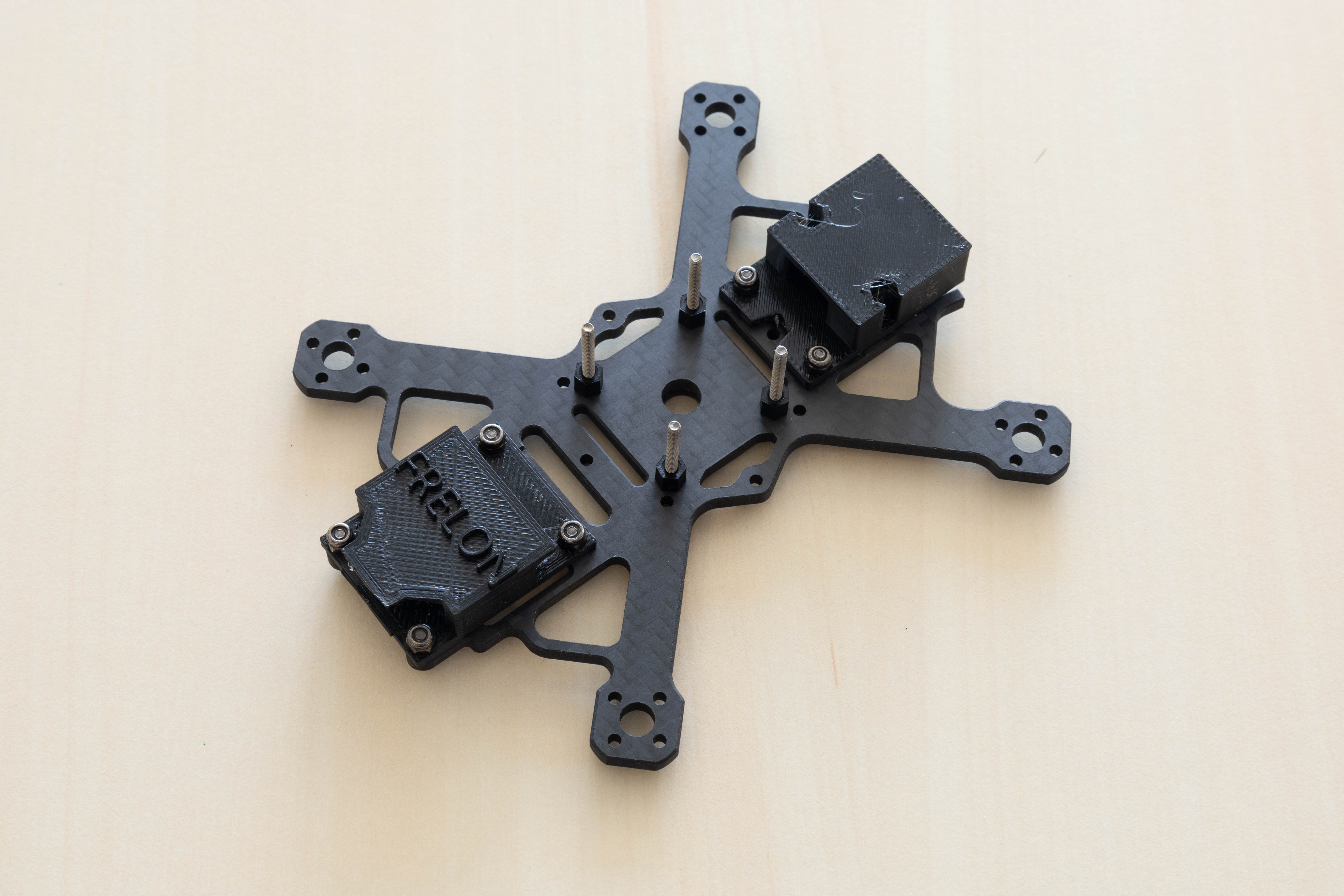
En suivant les indications sur le kit d’assemblage du chassis cinewhoop 2.5" on commence par visser les ecrous en nylon sur les vis dans la partie centrale du drone comme sur l’image ci-dessous. On prendra soin d’imprimer le support pour l’ESP32 et le récepteur radio en TPU. Fichiers ici ********

On assemble les deux supports de la manière suivante avec les vis suivantes :
 |
 |
On fera attention a ne pas trop serrer les écrous pour ne pas endommager les supports qui sont en plastique souple.
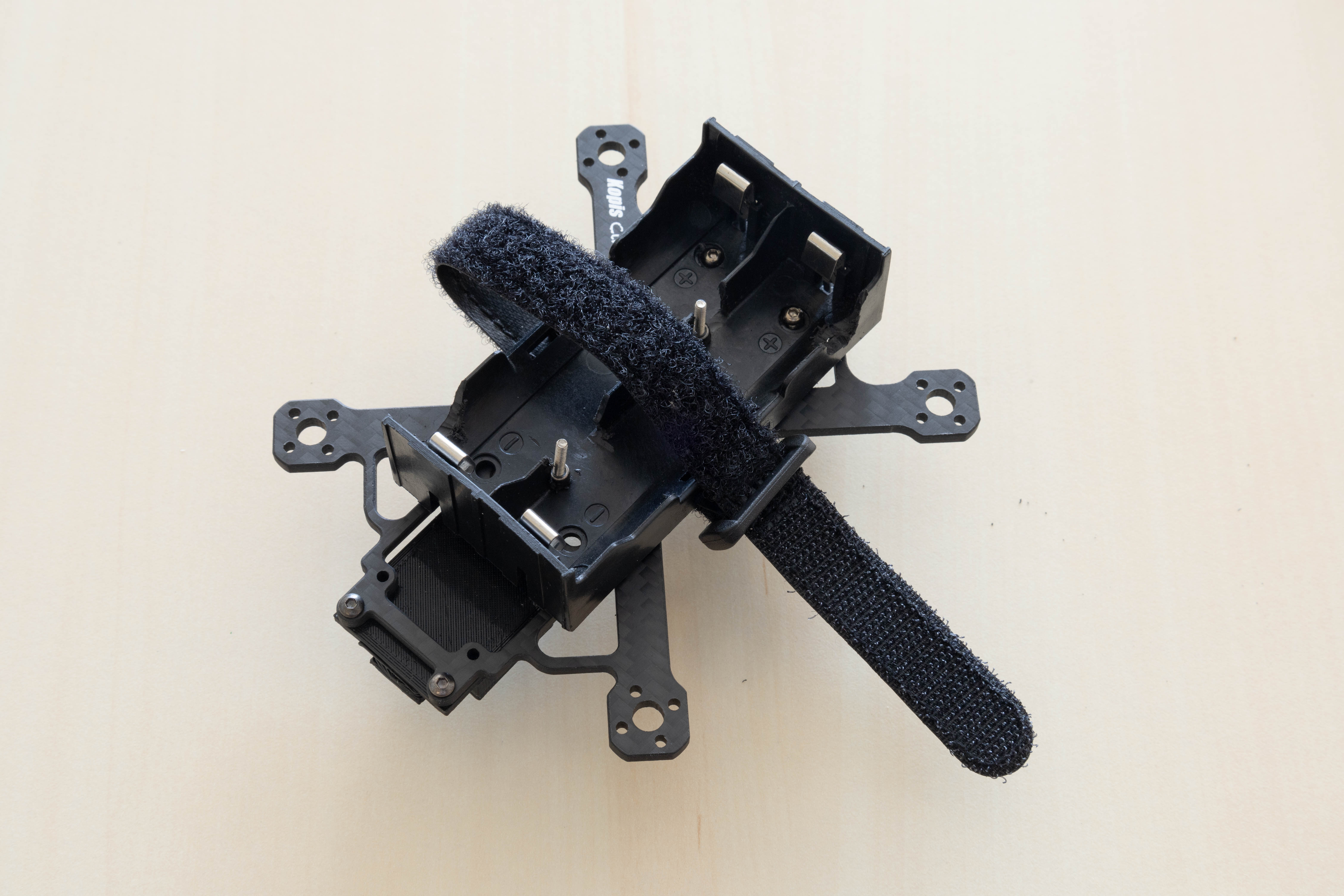
On fait deux encoches ******* attention aux COURTS CIRCUITS Ensuite on vient installer le support de batterie avec deux vis *********** en pensant bien a intercaller le strap pour les batteries entre la plaque en carbone et le support des batteries.
Si ce n’est déjà fait on connecte tous les composants en suivant ce schéma de câblage (voir section précédente pour plus de détails):

Ensuite on installera les composants electroniques dans le châssis .
On positionnera et brasera les moteurs sur l’ESC comme sur l’image ci-dessous.

Il faut ensuite fixer les moteurs sur le chassis avec les entretoises et les protections d’hélices en suivant les instructions fournies avec le kit du drone. Le résultat est donné

 |
 |
 |
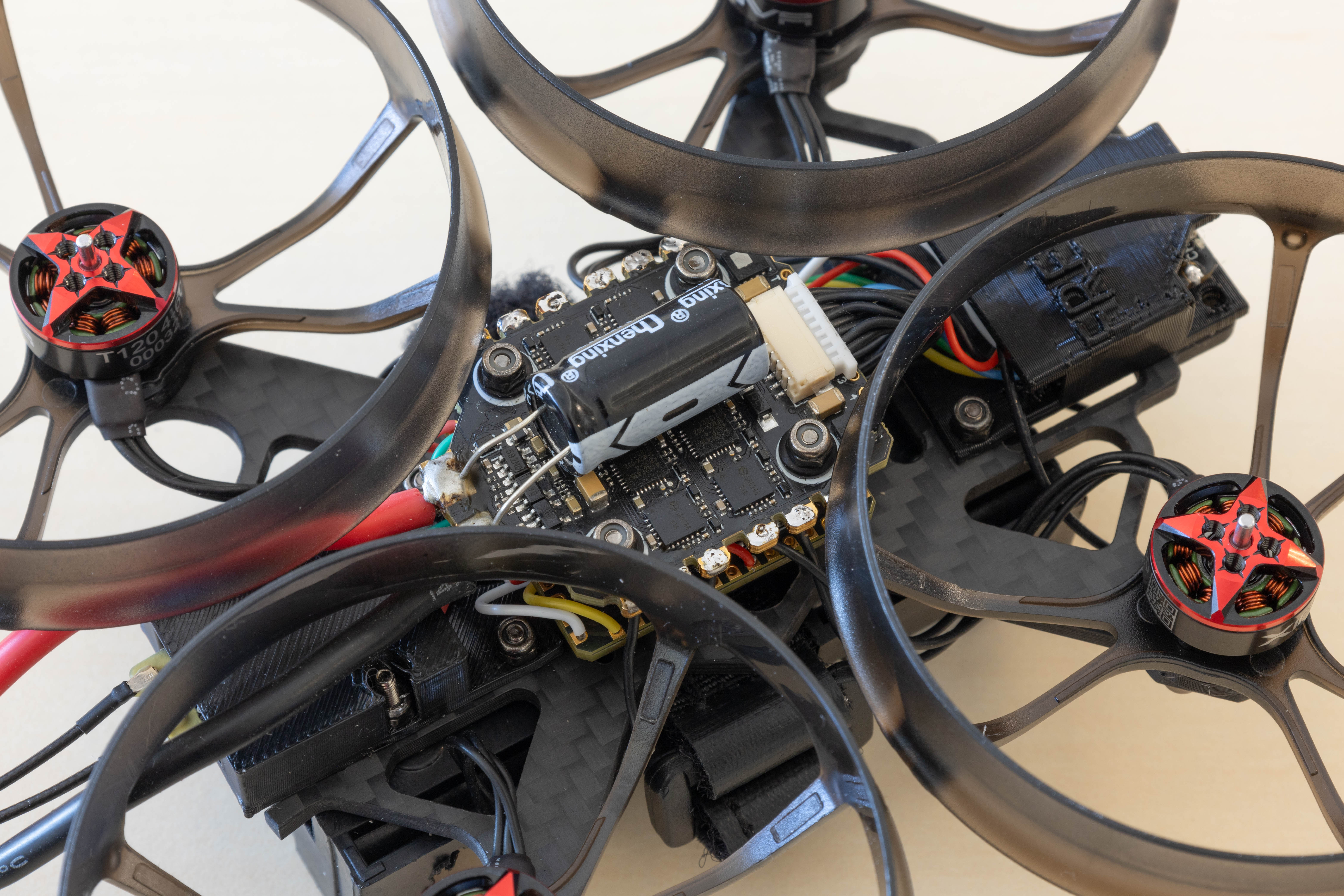
On rajoutera les hélices au drone pour obtenir le résultat suivant :

Voici le résultat final sans les batteries 18650 (attention à la polarité en les branchants)
 |
 |
 |
