Flash ESC
Nous avons développés un code AM32 personalisé permettant de réguler la vitesse de roation des moteurs brushless. Cela permet plusieurs choses :
- On peut estimer avec précision la vitesse de rotation de chaque moteur et ainsi sa force de poussée -> estimation force de poussée du drone
- compensation de la chute de tension de la batterie qui permet un vol plus constant et indépendant de la betterie et de son niveau de chargement
Flasher le firmware AM32 personnalisé dans l’ESC
- Téléchargez le firmware AM32 personnalisé suivant à partir du lien : lien
Deux possibilités :
-
Télécharger l’archive complète dans la partie asset (.zip file).
-
Télécharger directement le fichier hex dédié correspondant au bon mcu (écrit sur la puce sur l’ESC).
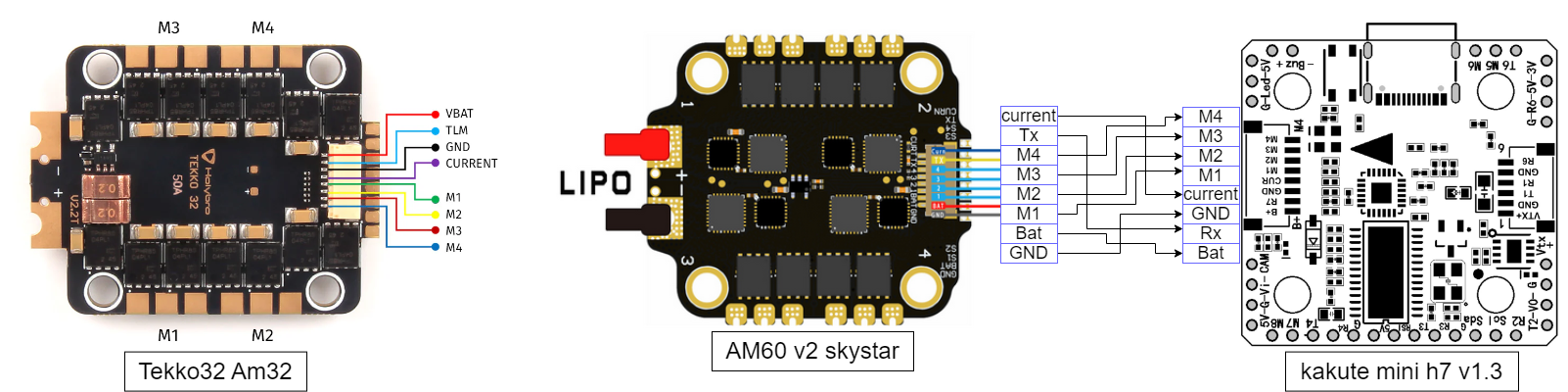
Note : si vous utilisez un ESC AM60v2, attention au câble de connection entre le FC kakute en betaflight et l’ESC. Avec les ESC tekko 32 ce n’est pas un problème (voir figure ci-dessous) :
-
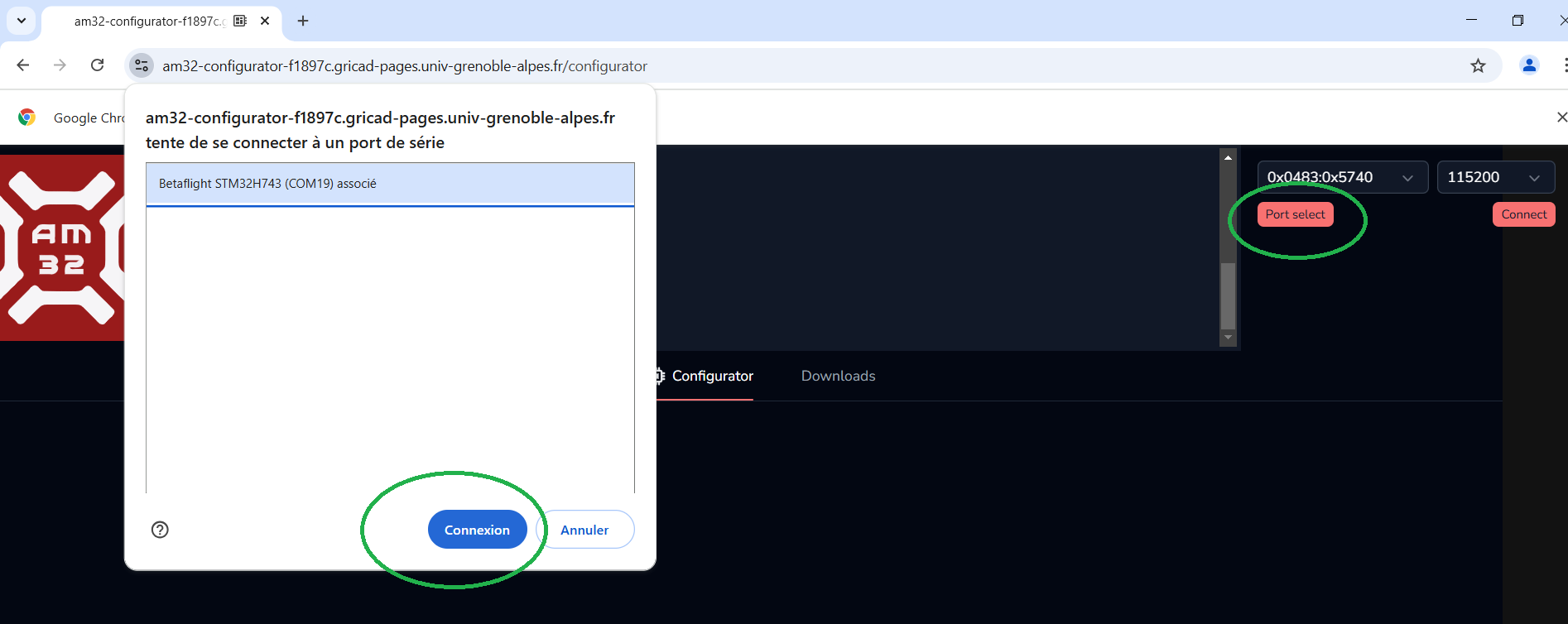
Aller sur le lien suivant dans CHROME
-
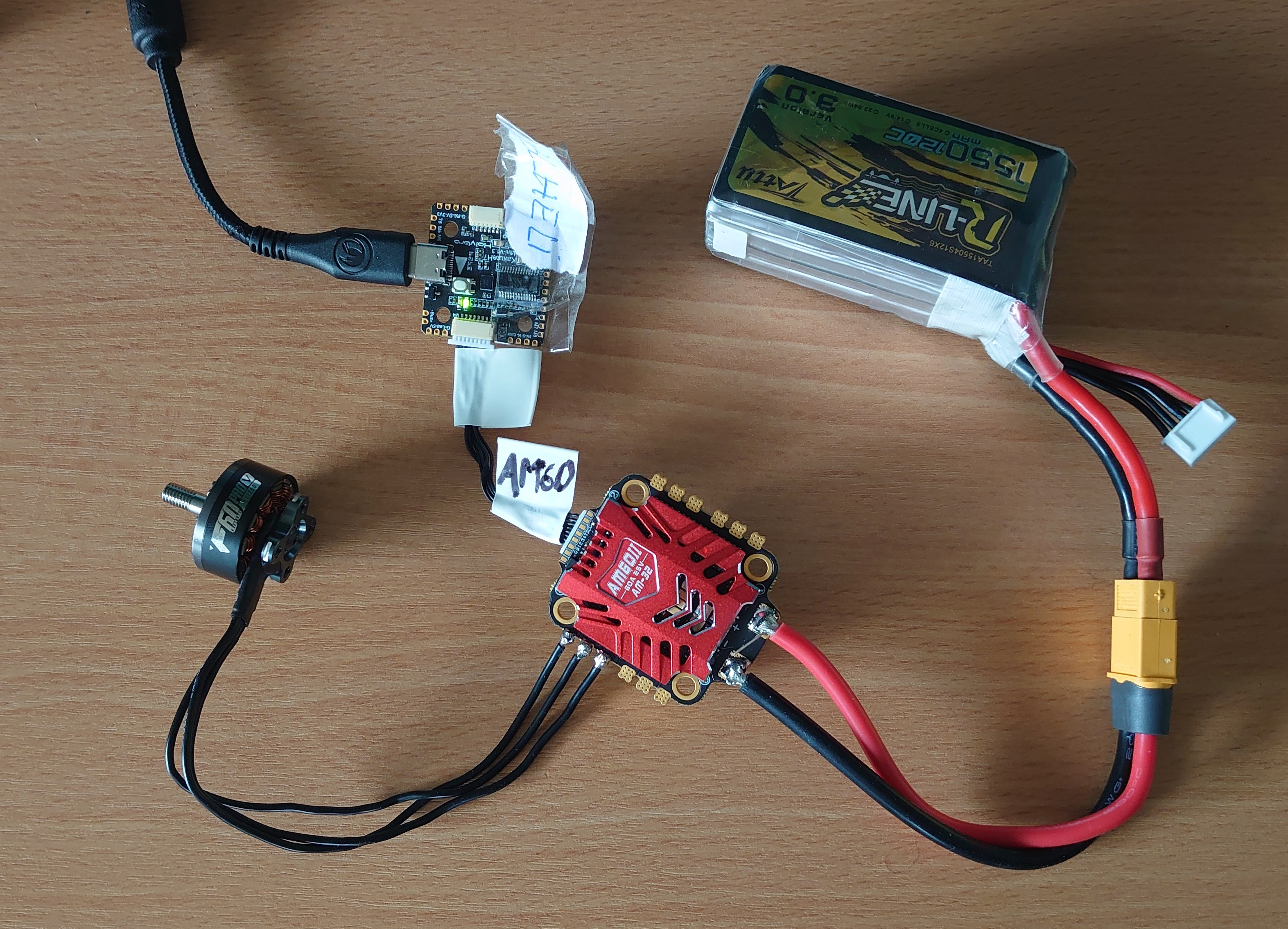
Nous utilisons un FC Kakute avec BETA-FLIGHT pour configurer l’ESC, celui-ci est connecté avec le câble usb‑c à l’ordinateur et la batterie à l’ESC comme sur l’image suivante :
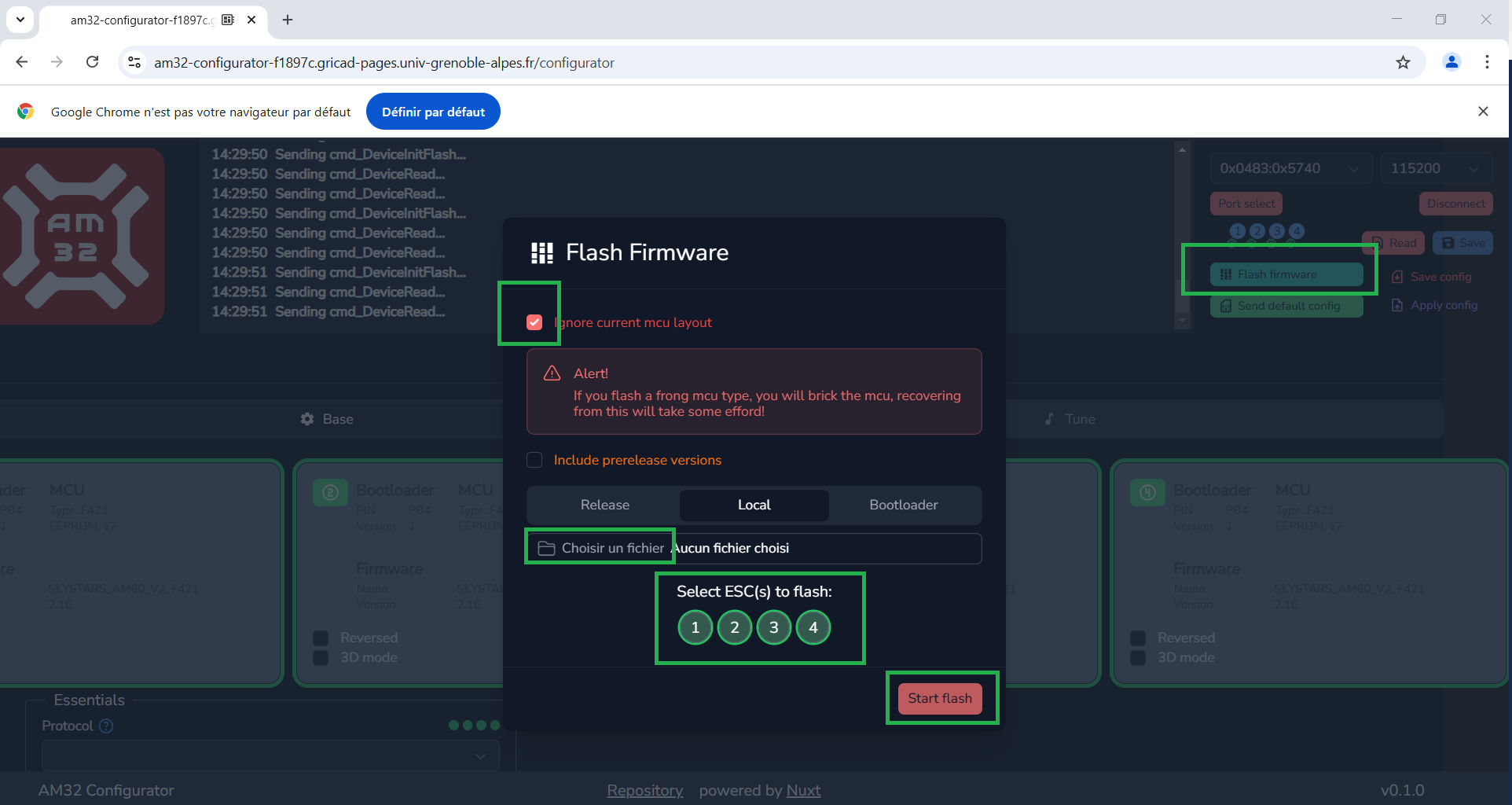
Sélectionnez le fichier .hex que vous avez téléchargé précédemment
Une fois le firmware flashé, configurez le système avec les paramètres suivants
et changez la musique des ESC, cela permet d’identifier les drones (et c’est chouette)! On peut trouver des sons compatibles ici
