Configuration indoor
Télécharger et ouvrir QGroundControl
Commencer par ouvrir QGroundControl, un logiciel open source permettant le contrôle et la gestion de drones via une interface utilisateur complète. Télécharger le logiciel à partir de Downloads - QGroundControl - Drone Control.
Setup de PX4 avec les fichiers de configuration
On peut mettre à jour le firmware directement dans le logiciel de station sol (exemple : Qgroundcontrol).
Ensuite on peut flasher les paramètres suivants dans la FC. Pour faire ça il suffit d’aller dans vehicle setup puis paramètres et d’importer le fichier suivant qu’il faudra dézipper au préalable.
En cas de problèmes : Setup de PX4 pas a pas
Cette section concerne la configuration et le flash de plusieurs parties du drone. Dans un premier temps il ne s’agit que de configurer px4 avec des réglages classiques. Sur la figure ci-contre on présente les sections à configurer :
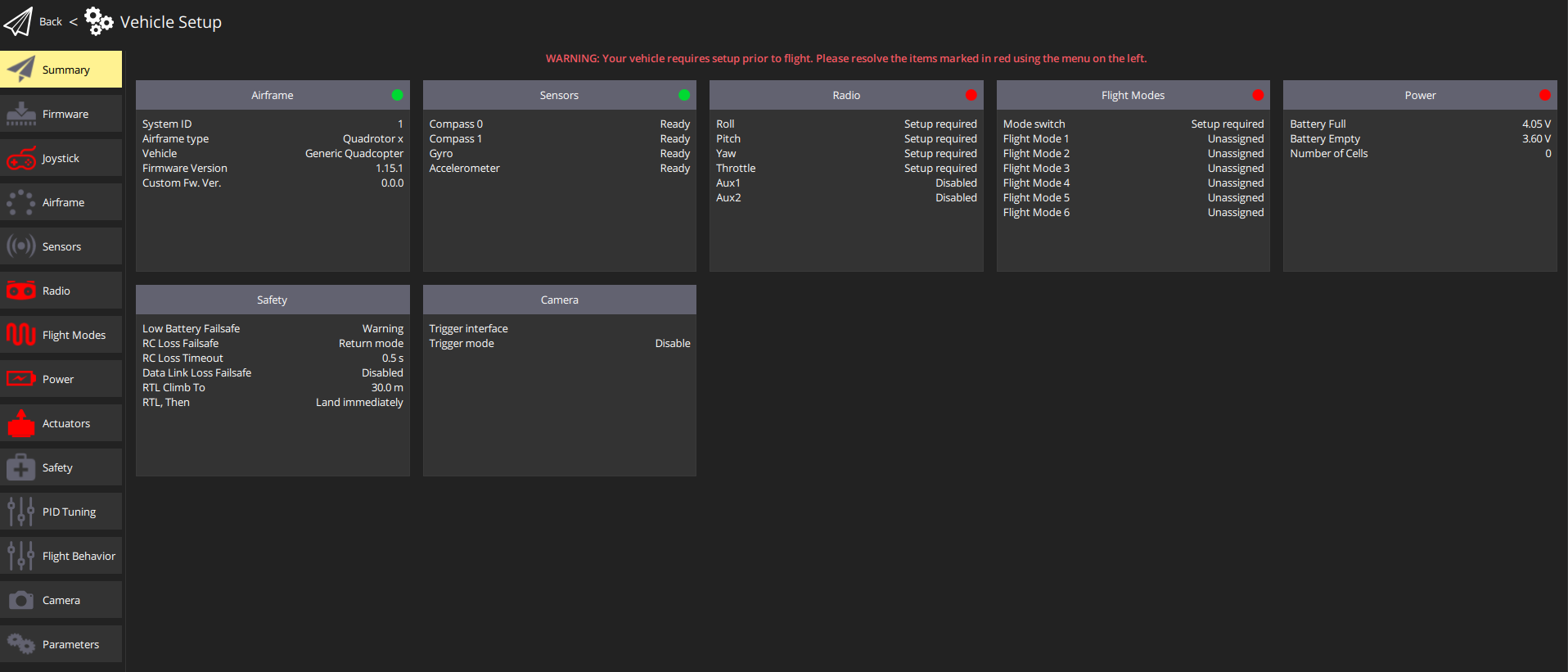
on retrouve notamment :
-
Airframe : Quadrotor X → appliquer et redédmarrer
-
Sensor calibration → faire toutes les calibrations et changer l’orientation si nécessaire
-
Radio : Calibration des maximums et minimums (voir section suivante pour plus de détails)
-
Flight modes (Kill | Onboard / offboard | arm | flight modes | RTH)
-
Power : nombre de cellules 4 | Vide 3.5V | Plein 4.2V | Source : Power Module et faire la calibration en mesurant la tension de la batterie au voltmètre
-
Actionneurs → DShot 600
Dans la liste des paramètres :
-
Sys_has_mag → 0
-
Ser_TEL1_BAUD → 921600
-
UXRCE_DDS_CFG → TELEM2
-
EKF2_HGT_REF → Vision
-
DSHOT_TEL_CFG → telem/serial4
Le réglage des PID devrait nativement être plutôt bon mais on peut refaire une passe dessus. On peut également utiiliser l’auto-tune au besoin.
