Apairage avec station sol
Configurer les paramètres initiaux dans QGroundControl
À l’ouverture, une carte du monde s’affiche. Cliquer sur le logo “Q” en haut à gauche pour ouvrir le menu principal.

3. Accéder aux paramètres de connexion
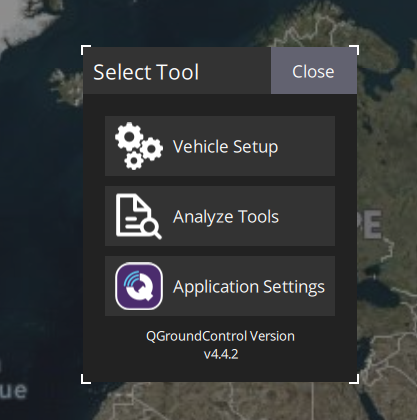
Dans le menu “Select Tool”, cliquer sur Application Settings. Puis, dans le menu de gauche, sélectionner Comm Links pour accéder aux paramètres de connexion.
4. Ajouter le drone
Pour ajouter le drone, cliquer sur le bouton Add en bas de la page. Saisir ensuite les paramètres de connexion :
- Nom : Choisir un nom pour identifier le drone.
- Server addresses : Saisir l’adresse IP du drone, cliquer sur Add server.
- Type : Sélectionner UDP comme type de connexion.
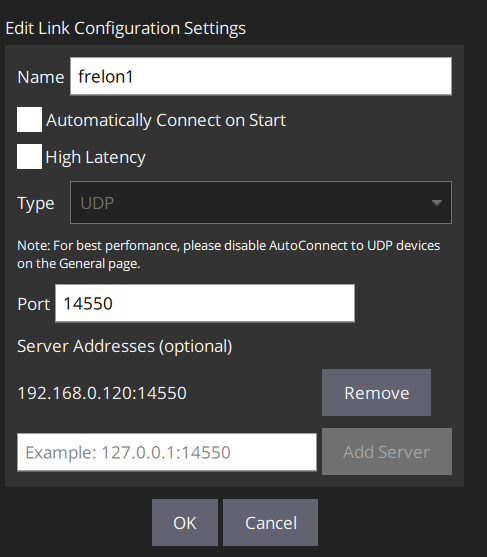
Une fois les informations saisies, cliquer sur OK.
5. Se connecter au drone
Retourner à l’écran principal des connexions (fenêtre Comm Link), où le drone apparaît maintenant dans une liste. Sélectionner le drone en cliquant dessus (le cadre doit devenir jaune pour confirmer la sélection), puis cliquer sur Connect en bas de la page.
6. Vérification de la connexion
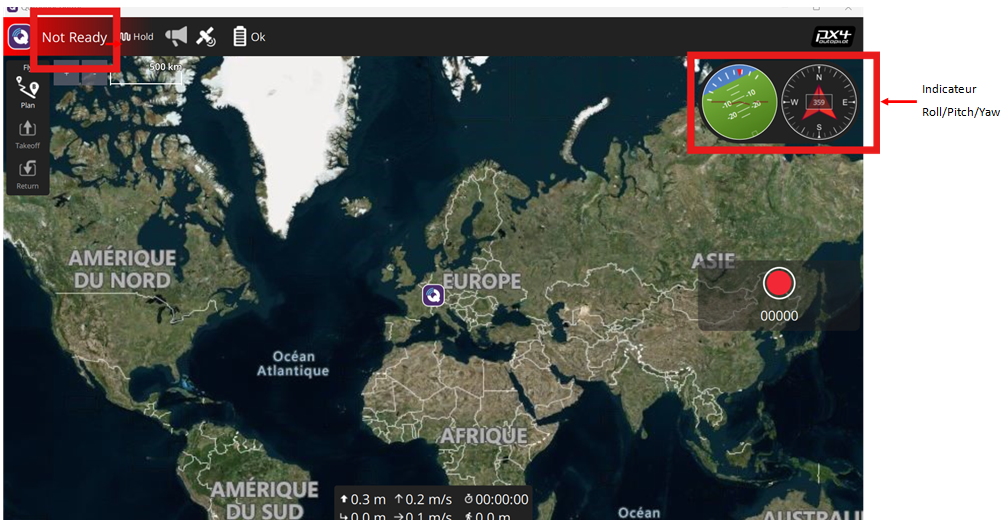
Si la connexion est réussie, l’état “Not Ready” apparaîtra en haut à gauche de l’écran principal. Les mouvements du drone sont alors observables en temps réel dans la fenêtre principale via l’indicateur Roll/Pitch/Yaw.
Résoudre les problèmes de connexion
Si “Not Connected” apparaît toujours : Vérifier que le drone est configuré pour accepter la connexion en ouvrant une page Web et en entrant l’adresse IP du drone sous la forme 192.168.* .*/config1.

Dans l’interface de configuration, désactiver le Serial Port, puis cliquer sur Update en bas de la page. Débrancher le drone et le rebrancher.
Aller dans la configuration à 192.168.* .*/config0 et activer cette fois le Serial Port.
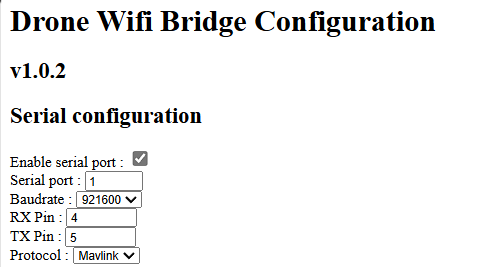
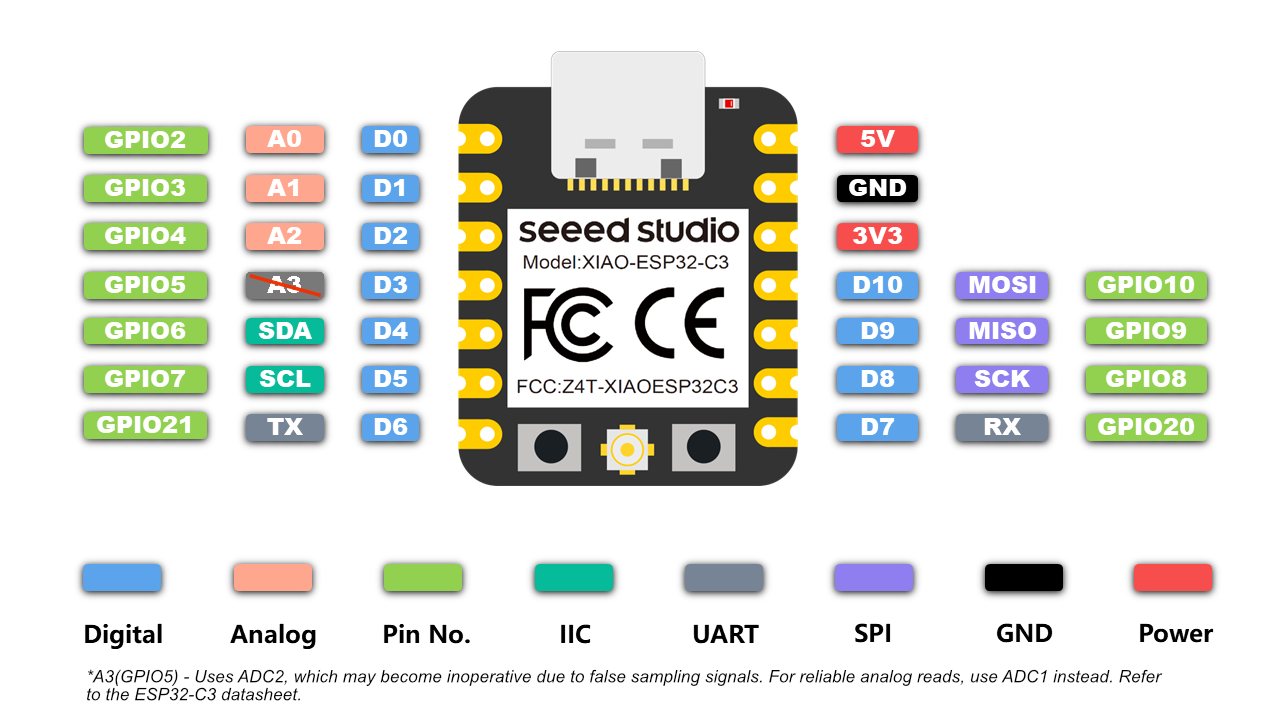
Vérifier les connexions Rx et Tx directement sur l’ESP32 du drone. Les combinaisons de GPIO possibles pour ces broches sont :
- Rx = 4 et Tx = 5, ou l’inverse
- Rx = 2 et Tx = 3, ou l’inverse
- Rx = 20 et Tx = 21, ou l’inverse
Cliquer à nouveau sur Update, débrancher et rebrancher le drone. Tester les configurations possibles jusqu’à obtenir “Not Ready” dans QGroundControl.
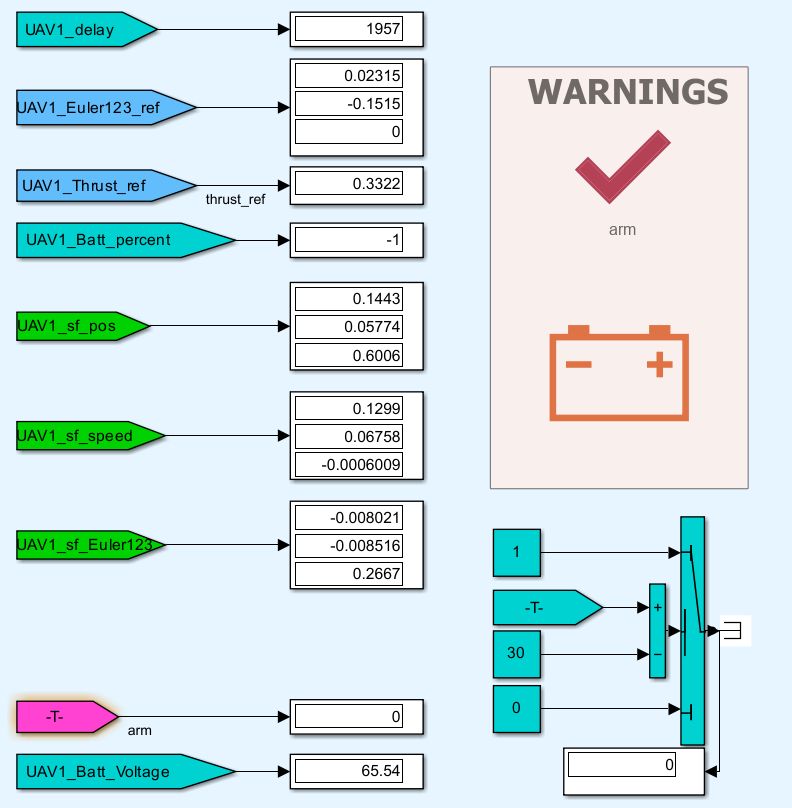
7. Paramétrer simulink
Ouvrir “Frelon_main.m” sur Matlab. Mettre à jour la valeur de “UAV1_IP_Adress” avec l’adresse IP du drone.
Lancer “Frelon_main.m” pour initialiser les variables et fonctions puis démarrer le simulink “Frelon-simulink”. Lors de son exécution des valeurs doivent s’afficher dans le cadre “UAV1 DATA” :