Montage
Open Modular Drone © 2024 by CNRS - Open-perform is licensed under CC BY 4.0
Notice de montage
Une fois que toutes les pièces du système sont achetés on peut passer à
la réalisation du système. On précise que la quasi-totalité des vis sont
en M3*10mm, idéalement en titane pour le poids.
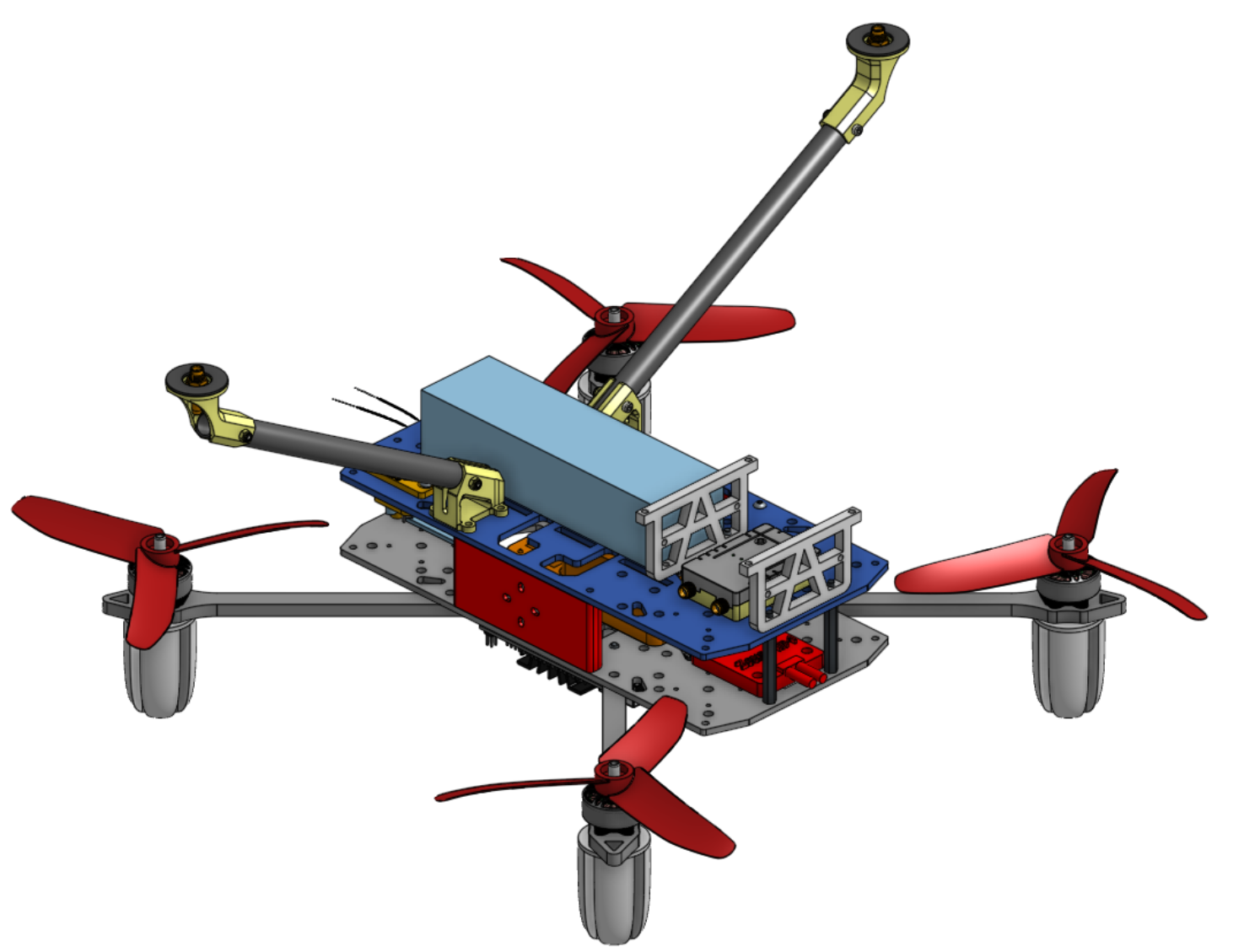
On précise qu’il n’y a que le gps à double antenne a monter (noté GPS 1
et 2). Le GPS Drotek (noté GPS 3) n’est pas à monter. La caméra frontale
sur le schéma principale n’est pas à commander, ni la jetson nano en
dessous sur la CAO initiale. Ces trois équipements, GPS drotek / caméra
realsense et jetson nano ne sont ni à commander ni à installer.
-
insérer dans le support en TPU les éléments de télémétrie (ESP32 avec ses connectiques, frsky flashé et appareillé et télémétrie Holybro). Cela constitue "le module sans fils".
Le résultat devrait être comme sur l’image si dessous
Figure 1 : module sans fil -
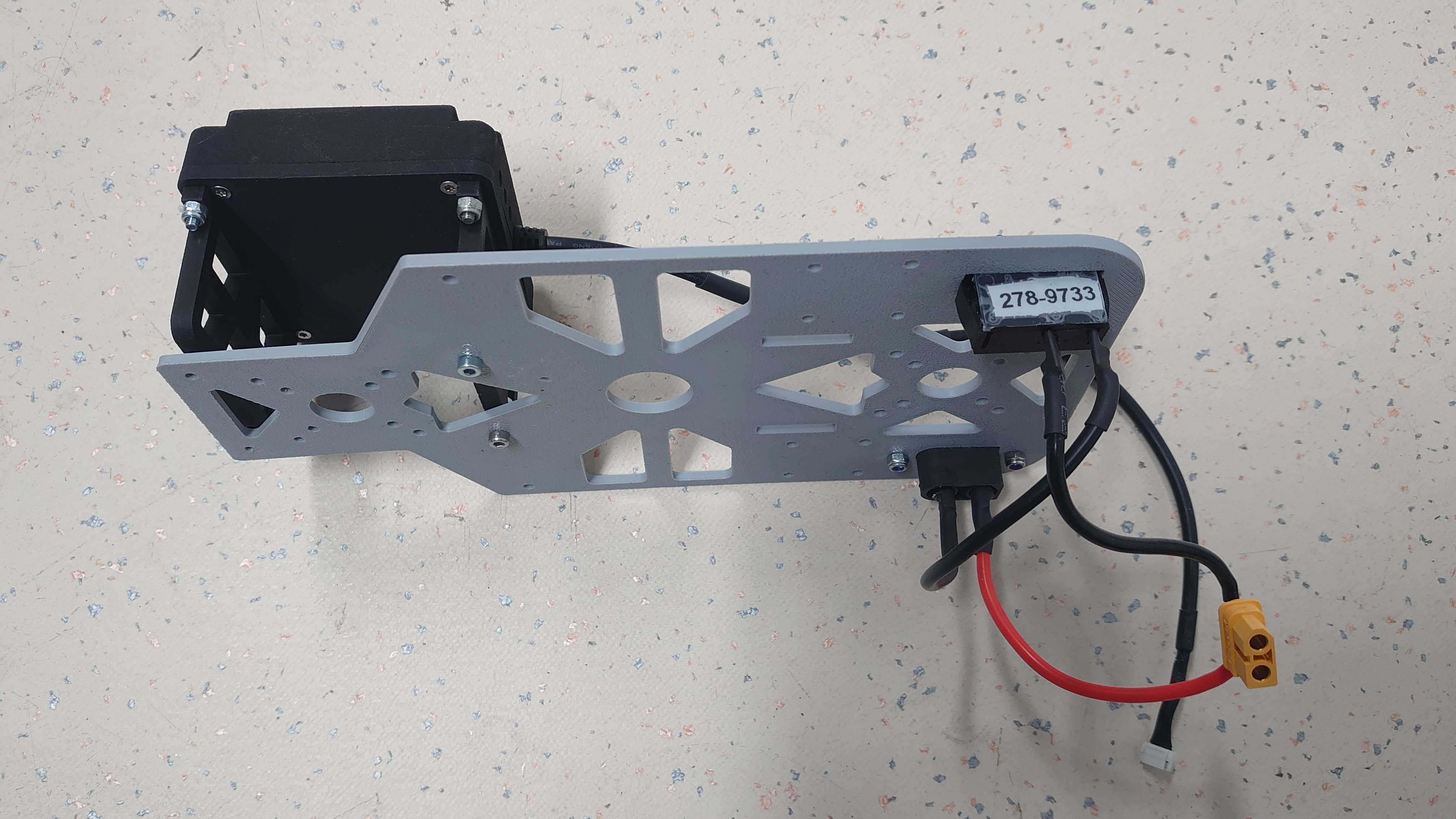
On brase le condensateur et un câble de puissance entre l’ESC et la carte d’alimentation PM-06. La carte d’alimentation est déjà fournie avec un connecteur XT60. Celui-ci permettra de pouvoir déconnecter la partie circuit de puissance présente sur la plaque supérieure de la partie inférieure du drone. La stack ressemble à la photo ci-dessous
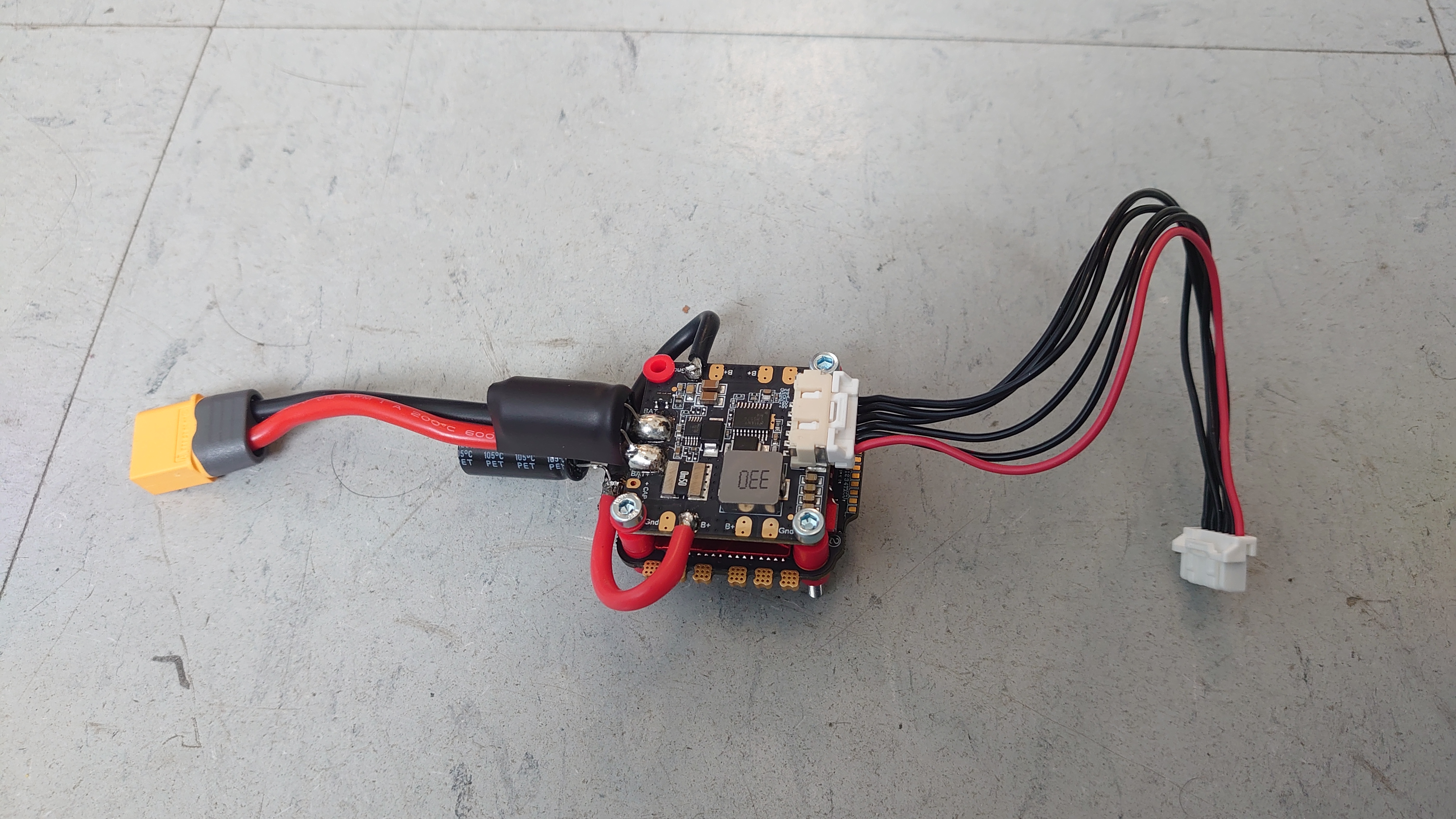
Figure 2 : Image de la stack la figure suivante décrit les différents trous de la plaque inférieure pour une meilleure compréhension de l’assemblage

Figure 3 : Plaque du bas -
Dans cette première version, les plaques latérales sont en PLA. Par la suite ce seront des plaques carbones. Pour les assembler, on presse les entretoises en leurs orifices. Il sera alors possible de fixer ces plaques latérales sur la plaque inférieure.
-
On fixe les quatre bras sur la plaque inférieure.
-
On fixe ensuite l’ESC à l’emplacement indiqué sur la figure 3. Le résultat est donné dans la figure suivante :
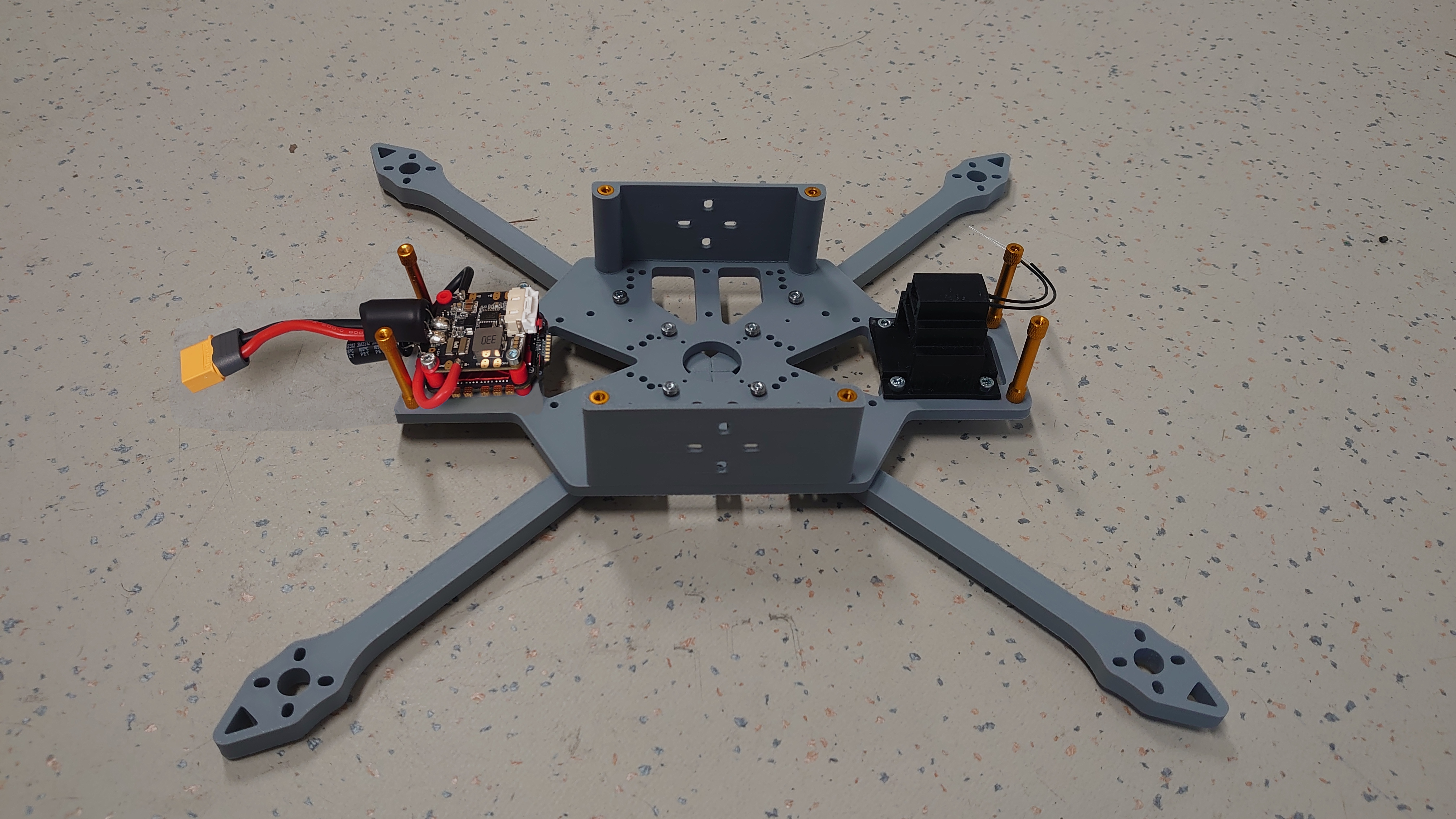
Figure 4 : Assemblage stack et module sans fil -
On fixe le support de la pixhawk à celle-ci par le biais de vis M2*5 comme sur l’image suivante
Figure 5 : Fixation du support de la pixhawk -
On fixe ensuite le support sur la plaque inférieure ce qui nous donne le résultat suivant
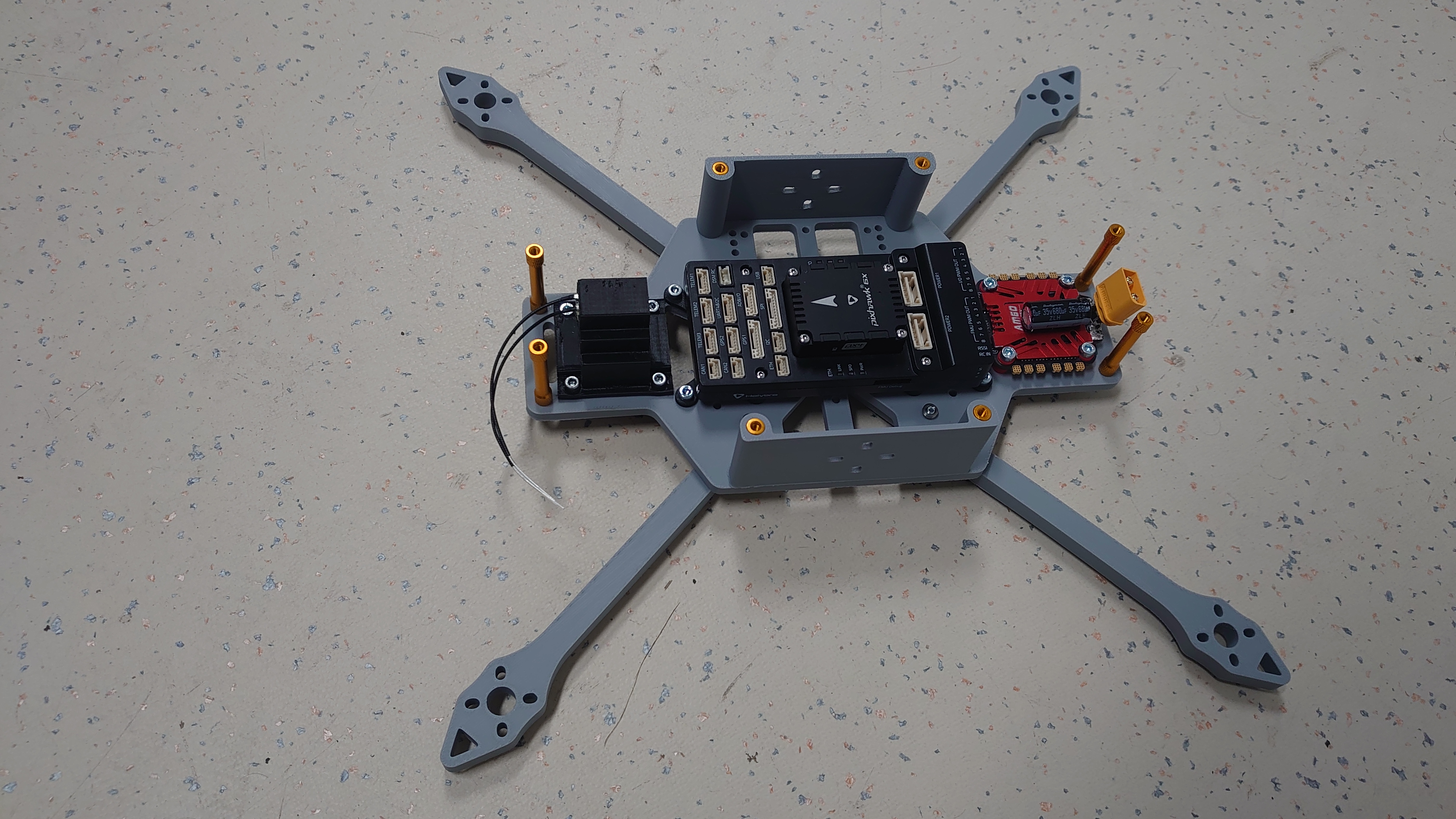
Figure 6 : plaque inférieure avec contrôleur -
finir de brancher tous les raccords comme indiqué dans la section précédente
-
On fixe les moteurs sur les quatre bras en faisant attention a ne pas transpercer les fils en cuivre du dit moteur. En effet si on ne prend pas des vis de la bonne longueur, le bout de la vis peut traverser et endommager l’actionneur. La figure suivante montre le montage correct du moteur avec son pied. On aura pris soin de rajouter une petite rondelle sous chaque vis permettant la diffusion de la force de serrage sur la base du pied qui est souple (en TPU).
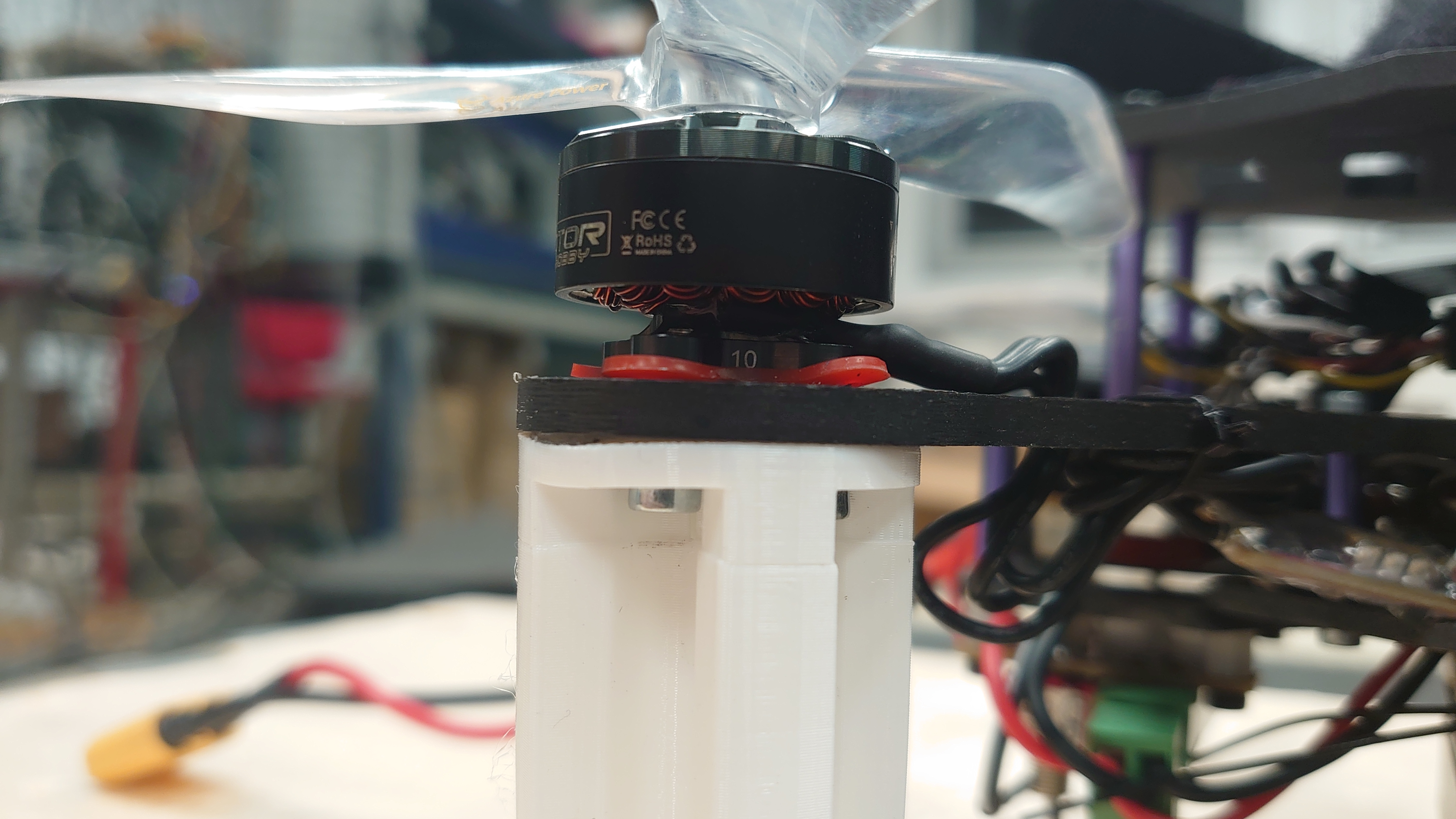
Figure 7 : Un assemblage pied et moteur -
On brase les quatre moteurs sur l’ESC si ce n’est pas déjà fait
-
On pourra ensuite monter les deux antennes GPS (1 et 2) au niveau de la plaque supérieure de part et d’autre de la batterie avec les trous prévus à cet effet (voir figure qui suit).

Figure 8 : Plaque du haut -
On prendra le soin d’ajouter l’interrupteur dans son emplacement ainsi que de visser la connectique XT90. On brase une connectique XT60 femelle a des connectiques de puissance jusqu’à la connectique XT90. L’interrupteur est à braser en série dans le circuit du - (en noir). Pour rappel, ce montage electrique est schématisé dans la section précédente.
-
On pourra fixer les supports en PLA du GPS avec des vis et écrous m3.
-
La structure est à fixer au niveau des trous "cale batterie" de la figure 8 (plaque du haut) avec des vis fixées par en-dessous et des écrous au niveau de la pièce en PLA.
-
Pour les deux autres orifices correspondants aux entretoises 2 et 3 de la figure 8, on utilisera des vis d’ajustement que l’on viendra fixer avec des écrous sur le support PLA du GPS 3 comme sur la figure ci-dessous
Figure 10 : Assemblage vis sans tête -
On peut finalement visser les deux entretoises sur les vis d’ajustement.
Cas 1 : Installation GPS Drotec
- On peut monter le GPS sur son support en PLA monté à l’étape 13
On obtiens le montage suivant :
Cas 2 : Installation GPS Unicorn
-
On peut visser les deux bras 30° au niveau des orifices “antenne GPS 1 et 2 de la figure 8.
-
On peut coller le GPS en lui-même sur la plaque supérieure à l’aide du double face fourni, par exemple entre les deux plaques en PLA
-
On raccorde les antennes au GPS et on obtiens un drone qui ressemble a ceci :
Suite et fin de l’installation
-
on rajoute le strap dans la plaque supérieure
-
Enfin on assemble la plaque supérieure avec la plaque inférieure par le biais des entretoises et des vis m3 *10mm titane et on obtiens un drone ressemblant à la figure ci-dessous :
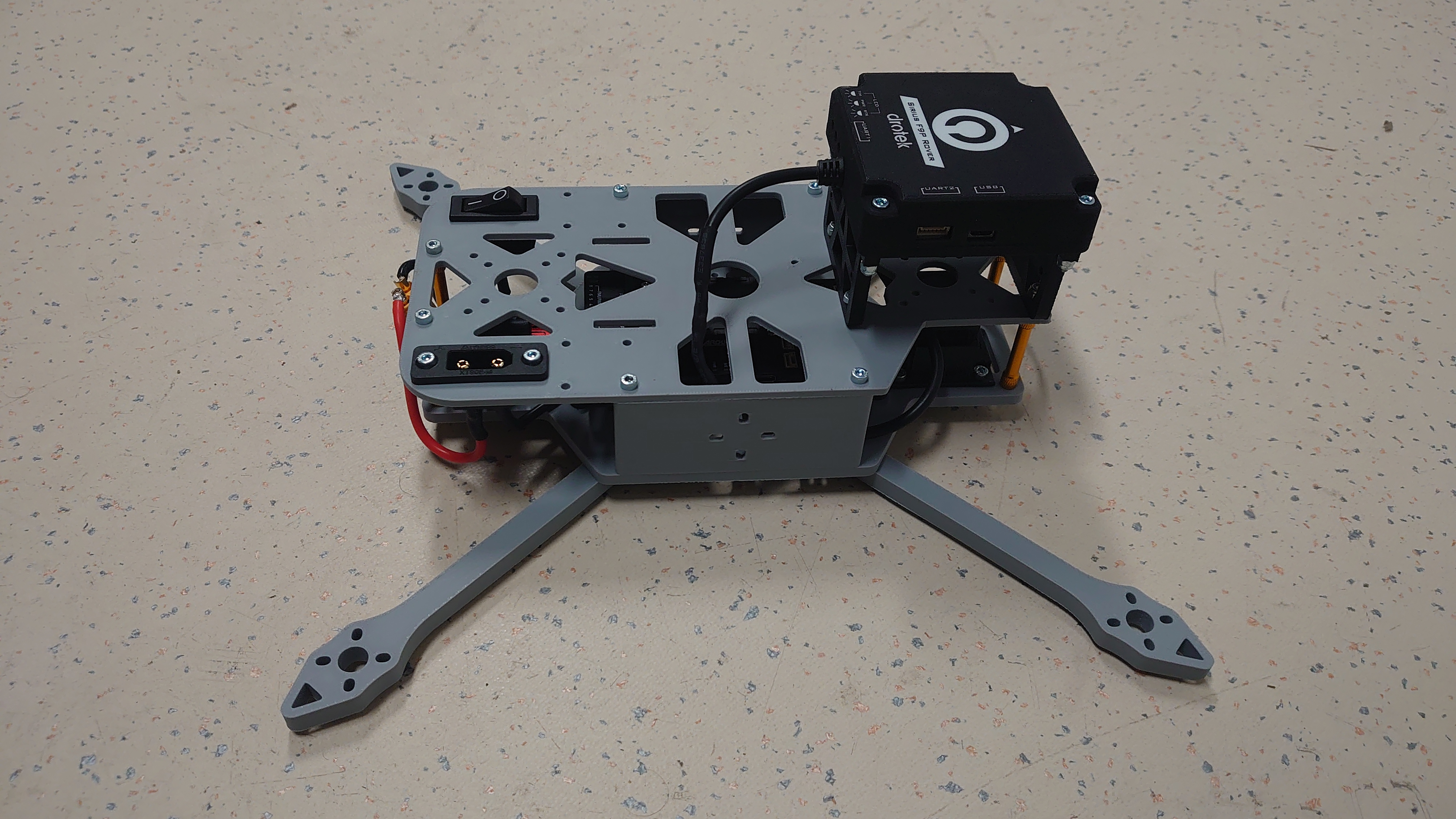
Figure 12 : Drone monté On précise que sur la photo ci-dessus qu’il manques certains éléments comme les moteurs et le strap. Les plaques sont en plastique mais l’idée est là.
