Paramétrage ESP32
version 2.0 et au-dessus
Après avoir pris conaissance des explications ci-dessous, suivre ce lien
version 1.3 et en-dessous
Après avoir pris conaissance des explications ci-dessous, suivre ce lien
Explication générale de la configuration de l’ESP32
Dans la section précédente on a connecté l’ESP32 au routeur. Celui-ci lui a donné une adresse IP. On peut s’y connecter en mettant cette adresse ip dans n’importe quel navigateur a condition d’être également connecté au réseau sur lequel est le drone.
Versions
Il faut faire attention a la version du bridge utilisée. Les messages a envoyer via UDP ne sont pas les mêmes en fonction des versions. Pour être sûr d’envoyer les bon messages on se rendra sur ce site et on selectionnera la bonne version du logiciel. L’interface graphique change également beaucoup entre la version 1 et 2.
Principe général
Le schéma suivant explique le principe de fonctionnement du bridge :
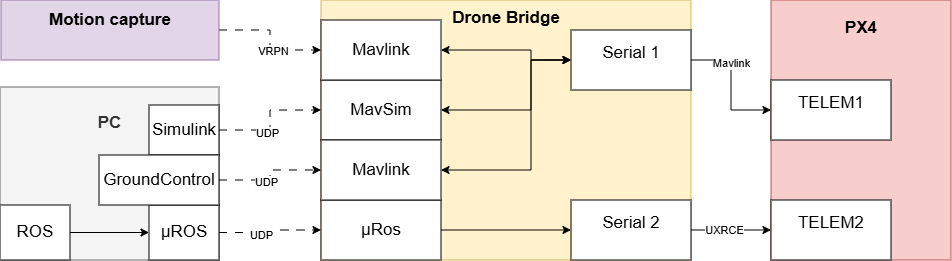
L’ESP32 (qui est le microcontrôleur faisant le bridge) fais le lien entre :
- les commandes ROS du PC jusqu’à PX4 via la liaison UDP puis UXRCE
- Les commandes Simulink via la liaison UDP puis mavlink
- Les informations de l’optitrack via la liaison VRPN puis mavlink
- les informations pour la station sol via la liaison UDP puis mavlink
