Configuration esp32 v 2
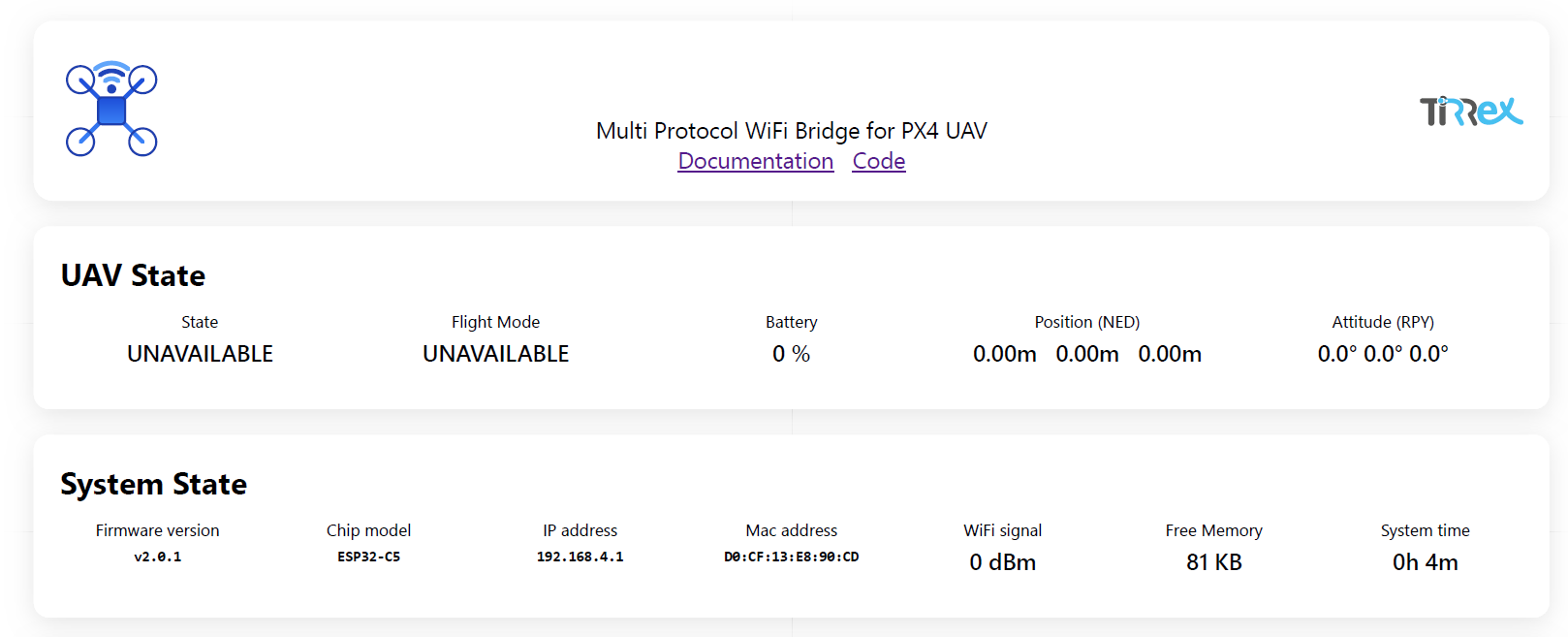
On se connectera a L’esp 32 du drone en renseignant l’adresse IP 192.168.4.1 si on se connecte au drone wifi bridge avec le mot de passe “password”, ou l’IP configurée dans le routeur à l’étape précédente. Les explications pour la configuration sont ci-dessous. Le navigateur arrive par défaut sur la page suivante :
Mavlink Serial configuration
Les ESP32 ont 2 ports séries connectés au FC. Le premier sert à la communication Mavlink / Simulink / Motioncapture alors que le deuxième sert à la communication ROS via UXRCE. On rappel ci-dessous le câblage à effectuer.
| 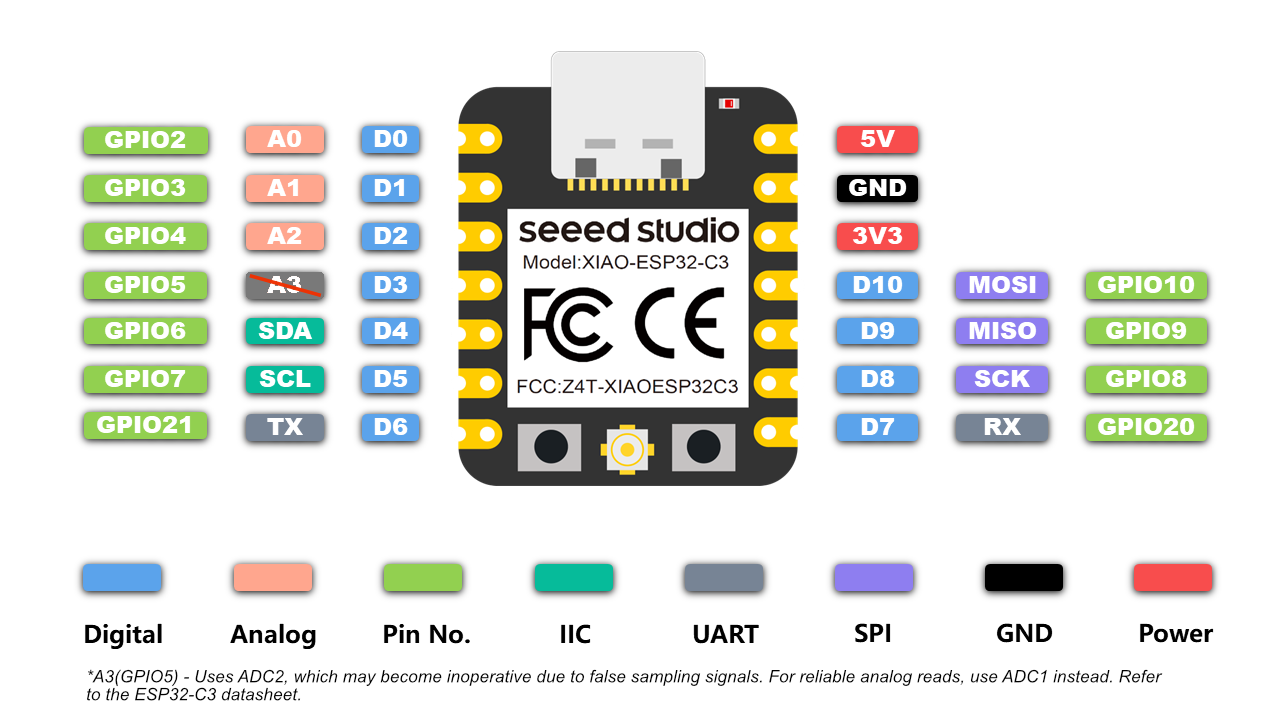 |
On peut choisir d’activer ou non les ports série et definir les pins utilisés pour cette liaison. Il est à noter qu’il s’agit des numéros des GPIO et non des numéro des pins ! La pin D0 correspond par exemple au GPIO 2 suivant le tableau ci-dessous.
| ESP32 Pin | ESP32 C3 GPIO | ESP32 C5 GPIO | ESP32 C6 GPIO | PX4 Pin | Function |
| GND | GND | GND | GND | GND | Ground |
| 5V | 5V | 5V | 5V | 5V | Power supply (5V) |
| RX | 20 | 12 | 17 | TELEM2_TX | UXRCE / Serial0 RX |
| TX | 21 | 11 | 16 | TELEM2_RX | UXRCE / Serial0 TX |
| D0 | 2 | 1 | 0 | TELEM1_TX | Mavlink / Serial1 RX |
| D1 | 3 | 0 | 1 | TELEM1_RX | Mavlink / Serial1 TX |
Par défaut, le firmware du pont Wi-Fi pour drone est configuré pour utiliser le port Serial0 (broches RX/TX) pour le protocole uxrce et le port Serial1 (broches D0/D1) pour le protocole Mavlink. Vous pouvez toutefois modifier la configuration du périphérique série et des broches sur la page de configuration.
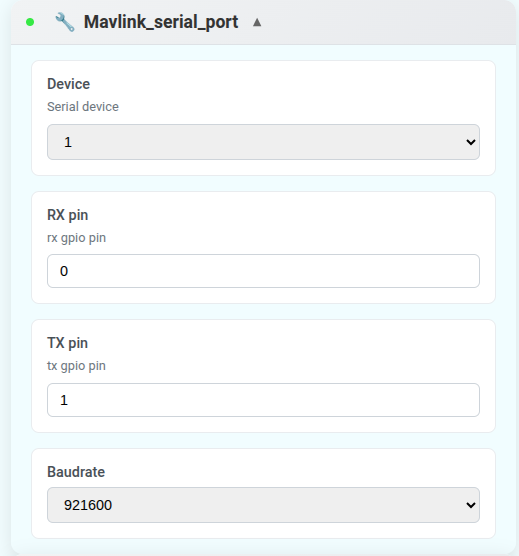
On privilégiera un Baudrate important 921600 par exemple pour avoir une communication plus rapide. Le protocole est a choisir en fonction de ce que l’on veut faire de ce port série :
- UXRCE pour ROS
- Mavlink pour le reste
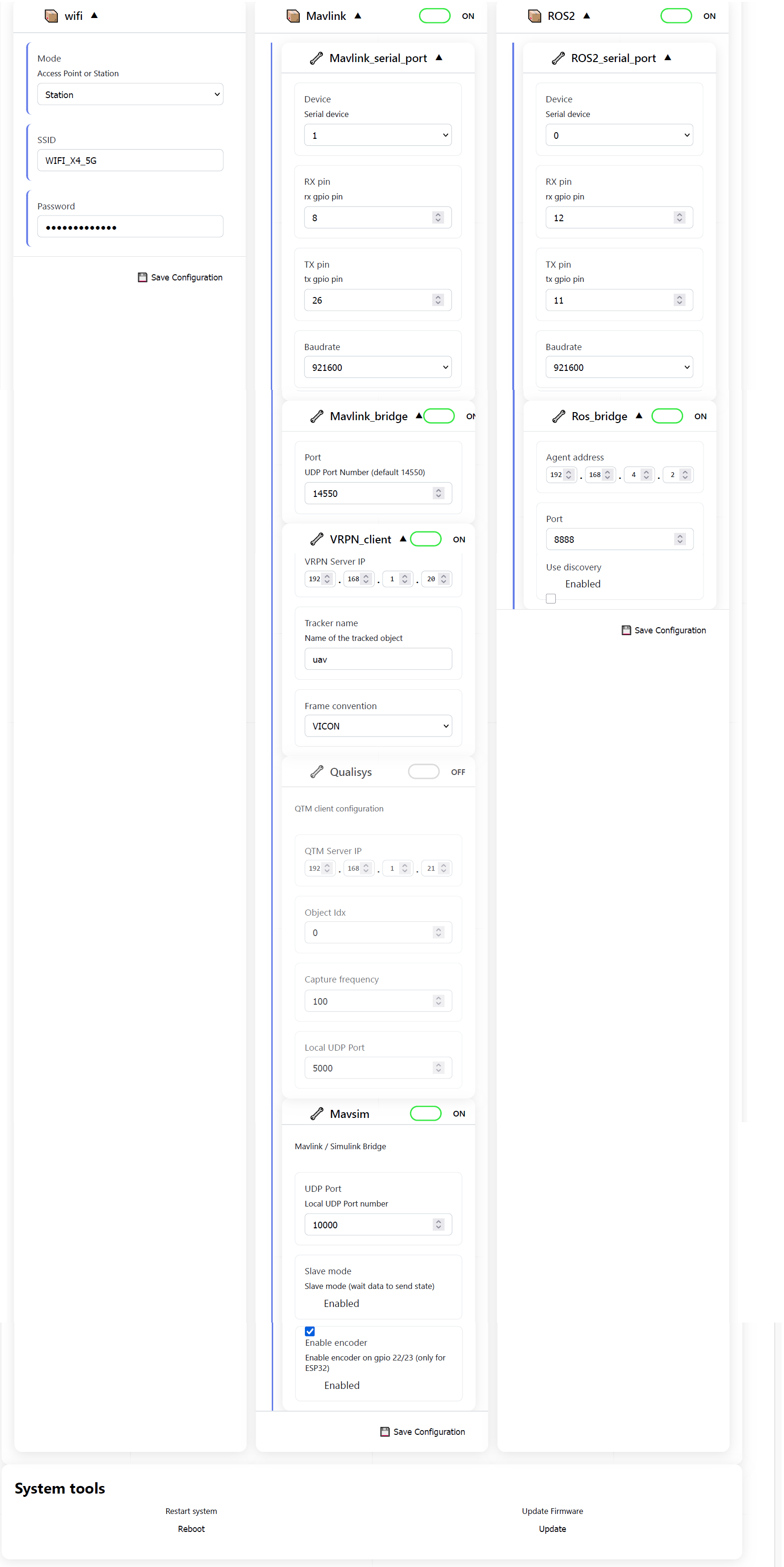
La configuration pourra in fine ressemble a ceci :
Attention a configurer correctement le GPIO, selon la carte celui-ci peut varier. N’hésitez pas a regarder ici
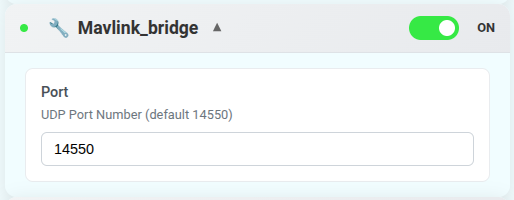
Mavlink UDP Bridge configuration
permet de réaliser la communication entre le drone et le PC (notammment la station sol). Lors de la connexion avec la station sol un port est demandé. Il peut être spécifié ici.
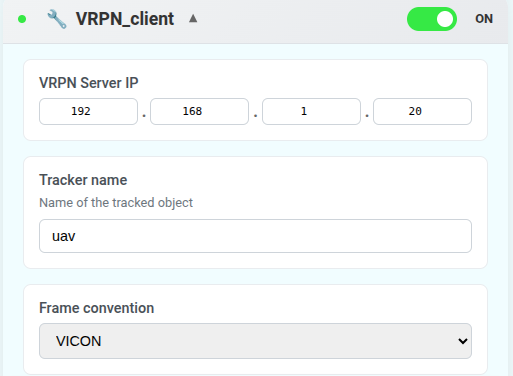
VRPN configuration
permet de réaliser la communication entre le serveur VRPN de la motion capture et le drone. Il ne faut en activer qu’un seul sur les deux ports serie, celui en Mavlink. On peut y configurer l’adresse IP du serveur VRPN ainsi que le nom de l’objet correspondant au drone et le type de motioncapture utilisée (Vicon / qualisys et bientôt Optitrack).
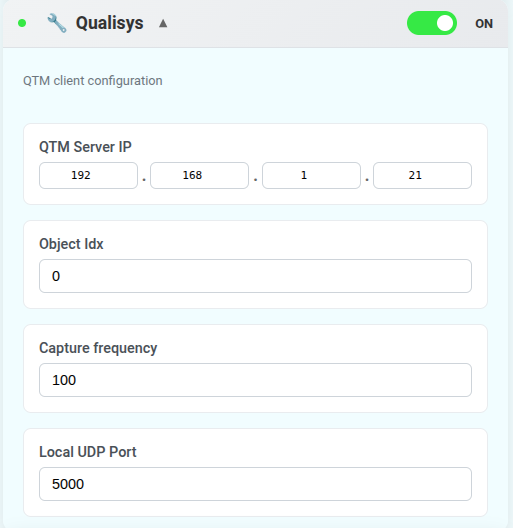
Qualysis configuration
Le client Qualisys permet au drone de recevoir des données de suivi d’un système de capture de mouvement Qualisys via le protocole UDP Qualisys. Vous pouvez modifier l’adresse du serveur Qualisys, l’identifiant de l’objet suivi, la fréquence de capture et le port UDP local. L’identifiant de l’objet correspond à son index dans le système Qualisys, à partir de 0.
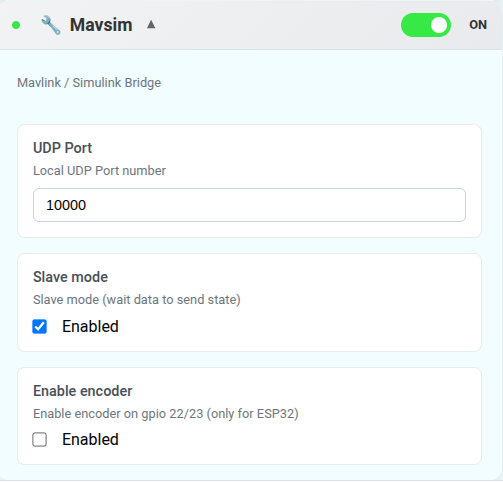
MAVSIM / Simulink configuration
Le protocole mavsim est conçu pour communiquer avec les applications Simulink. Son fonctionnement est expliqué dans la documentation du protocole mavsim. Il est possible de configurer le port UDP local et d’activer/désactiver le mode esclave. En mode esclave, le pont envoie des trames d’état UDP uniquement en réponse à un paquet entrant, tandis qu’en mode normal, il les envoie périodiquement. Sur le dispositif ESP32Wroom, il est également possible d’activer l’entrée de l’encodeur.
plus d’informations ici
ROS2 configuration
UXRCE Serial configuration
Les ESP32 ont 2 ports séries connectés au FC. Le premier sert à la communication Mavlink / Simulink / Motioncapture alors que le deuxième sert à la communication ROS via UXRCE. On rappel ci-dessous le câblage à effectuer.
| 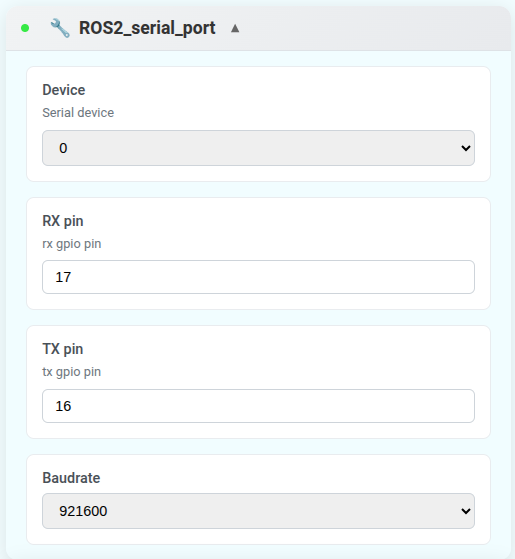 |
Attention a configurer correctement le GPIO, selon la carte celui-ci peut varier. N’hésitez pas a regarder ici
XRCE configuration
Le pont Mavlink permet de transmettre les messages UXRCE entre le port série et un port UDP Wi-Fi. Ce pont est indispensable pour connecter le drone à un agent MicroROS exécuté sur un ordinateur. Vous devez configurer l’adresse IP et le port de l’agent. Renseigner l’adresse IP de l’ordinateur qui est le ROS Master ! En option, vous pouvez activer le mode Découverte pour que l’agent trouve automatiquement son adresse IP, mais cela nécessite que l’agent soit exécuté avec la fonction de découverte activée.
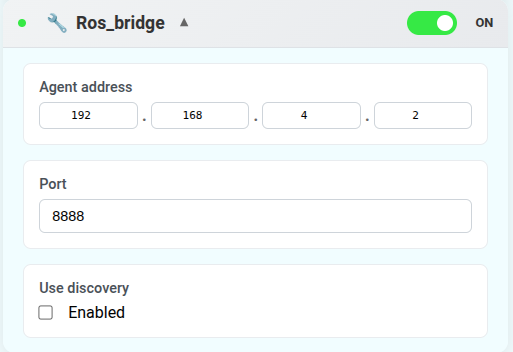
Quand tout est configuré, cliquer sur Update et na pas hésiter a faire un reboot.
