Électronique
Electronique de commande
Une connectique particulière est à braser sur l’ESP 32 à partir des connectiques a brancher sur la télémetrie fournies dans le boitier de la pixhawk. Le réusltat est donné dans la figure ci-dessous :

Le système est à connecter de la manière suivante :

Note : la liaison Uart 4 avec le récepteur est a faire si on active le retour télémétrique via la télécommande. Si c’est le cas il faudra alors connecter le port de télémétrie 4 de la pixhawk avec l’entrée SPort du récepteur FRSky. Plus de détails sont donnés ici. Un guide pour la configuration est disponible ici.
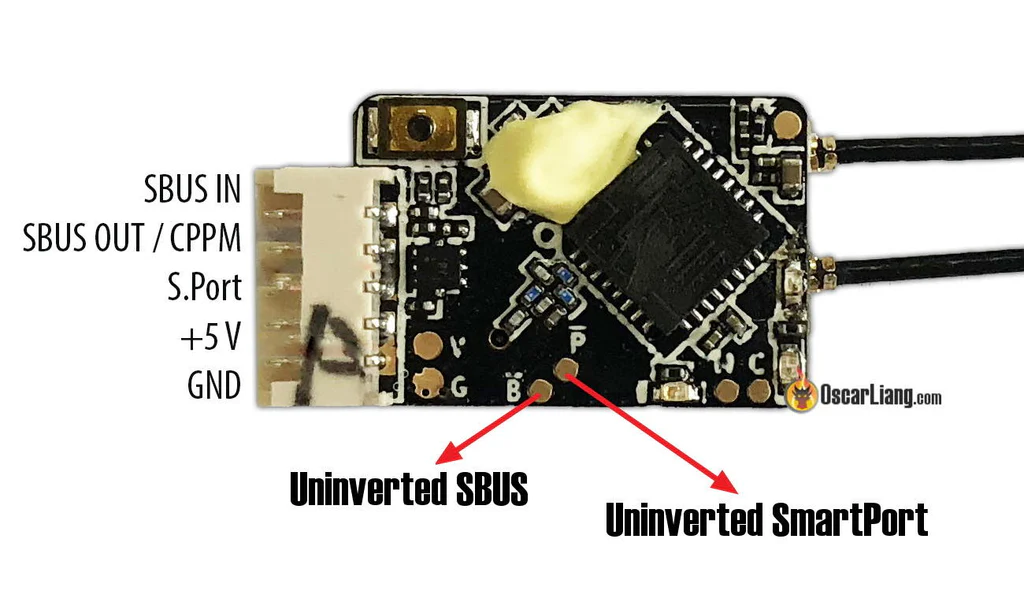
On redonne le pinout du récepteur radio :
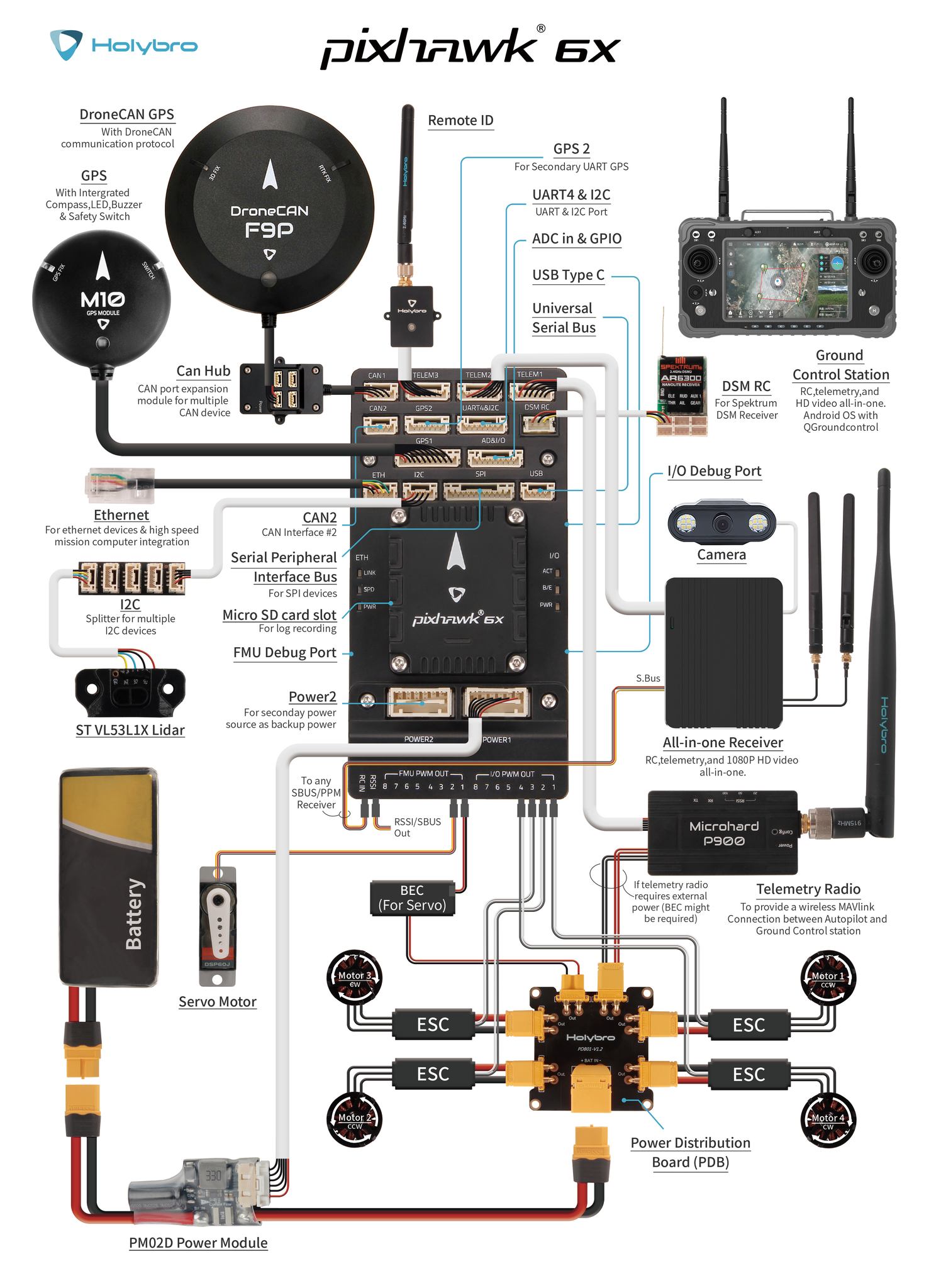
On redonne le schéma de branchement de la pixhawk 6x :
Electronique de puissance
Deux opérations sont a réaliser.
- La première consiste à braser les connectiques entre la prise de la batterie, via l’interrupteur on/off a la carte d’alimentation PM06.
- L’autre consiste à braser les moteurs à la carte Electronic speed controller (ESC)
On suivra le schéma de branchement suivant :

En rouge le + et en noir le -.
On prendra le soin de mettre le module PM06 en-dessous de l’ESC
