Nomenclature
Open Modular Drone © 2024 by CNRS - Open-perform is licensed under CC BY 4.0
Introduction
Dans le cadre du projet Tirrex, on souhaite réaliser un certain nombre de drones sur mesure avec une architecture matérielle et logicielle spécifique. Ce document permet de définir les étapes nécessaires à la réalisation de ce drone. Plusieurs types de drones sont envisagés, ce document ne traite exclusivement que du "OMD60" un drone 6".
Liste des pièces
La liste des pièces nécessaire est la suivante (certaines pièces sont en doubles pour garder un jeu supplémentaire)
| Composant Essentiels | Nombre | Référence | Lien vers un fournisseur |
|---|---|---|---|
| Contrôleur de vol | 1 | Pixhawk 6X (rev3) | Holybro |
| à défaut Cube Orange + Carrier Board ADS | Hexadrone | ||
| Alimentation Pixhawk | 1 | PM06 V2 Power module | Holybro |
| ESC 4en1 en AM32 | 1 | Tekko32 F4 Metal 4in1 65A ESC (AM32) | Holybro |
| ou | ESC AM60 AM 32 60A 30x30 - Skystars | DFR | |
| Moteurs | 4 | Moteur F60 PRO V 4-6S - T-Motor (4pcs) 1750 Kv | Studiosport |
| Hélices 6" tripales | 1 jeu | 6145 BPS - AZURE POWER | Hexadrone |
| Récepteur radio | 1 | FrSky r-xsr (ou MX+) | Studiosport |
| Passerelle wifi | 1 | ESP 32 | Gotronic |
| Télémétrie | 1 | Module de télémétrie SiK V3 - HOLYBRO | Holybro |
| Batterie LiPo 4S | 2 | LiPo 5000 mAh XT90 | FlashRc |
| GPS station sol | 1 | DroneCAN H-RTK F9P Helical | Holybro |
| GPS drone | 1 | H-RTK Unicore UM982 (Dual Antenna Heading) | Holybro |
| Antenne GPS biais | 1 | 30° Antenna Mount (Dual Antenna Heading) | Holybro |
| Entretoises | 1 | Entretoises en Aluminium 35mm (par 10) | DFR |
| 1 | Entretoises en nylon (par 10) M3*10mm | RS | |
| Visserie | 4 | M3*10mm vis titane à tête ronde (par 10) | DFR |
| 1 | Vis Nylon Noir M3 - 6mm (par 10) | DFR | |
| 1 | inserts filté pour carbone (par 10) | DFR | |
| 1 | Vis M2 5mm | DFR | |
| 1 | Vis de réglage M3 16mm | RS | |
| 1 | écrou frein filet | RS | |
| Fixation batterie | 1 | Strap 20*250mm | DFR |
| Prise XT90 mâle pour châssis | 1 | Prise XT90E-M | TME |
| Interrupteur pour batteries LiPo | 1 | Interrupteur 2789733 RS | RS |
| Pièces imprimée en 3D - TPU | 1 | Support ESP 32 / frsky / télémétrie | ici |
| 4 | Pieds drone | ici | |
| Pièces imprimée en 3D - PLA | 2 | Support GPS et realsense | ici |
| 2 | Plaques latérales | ici | |
| 2 | Support pixhawk | ici | |
| Plaque du bas 3mm | 1 | Découpe plaque carbone personalisée | Fournisseur : PCBWay |
| Plaque du haut 3mm | 1 | ||
| Bras 6mm | 4 |
| Composants facultatifs | Nombre | Référence | Lien vers un fournisseur |
|---|---|---|---|
| Chargeur LiPo | 1 | Imax B6 V2 AC/DC | DFR |
| Radio-commande radio | 1 | Radio Taranis X9 Lite | Studiosport |
| Câble usb-C coudé | 1 | R2ACR-1M-USB-CABLE | RS |
| Pièces de rechange | Nombre | Référence | Lien vers un fournisseur |
|---|---|---|---|
| ESC 4en1 en AM32 | 1 | Tekko32 F4 Metal 4in1 65A ESC (AM32) | Holybro |
| ou | ESC AM60 AM 32 60A 30x30 - Skystars | DFR | |
| Interrupteur pour batteries LiPo | 1 | Interrupteur 2789733 RS | RS |
| Alimentation Pixhawk | 1 | PM06 V2 Power module | Holybro |
| Hélices 6" tripales | 3 jeu | 6145 BPS - AZURE POWER | Hexadrone |
| Passerelle wifi | 1 | ESP 32 | Gotronic |
| Fixation batterie | 1 | Strap 20*250mm | DFR |
| Visserie | 1 | inserts filté pour carbone (par 10) | DFR |
| Visserie | 3 | M3*10mm vis titane à tête ronde (par 10) | DFR |
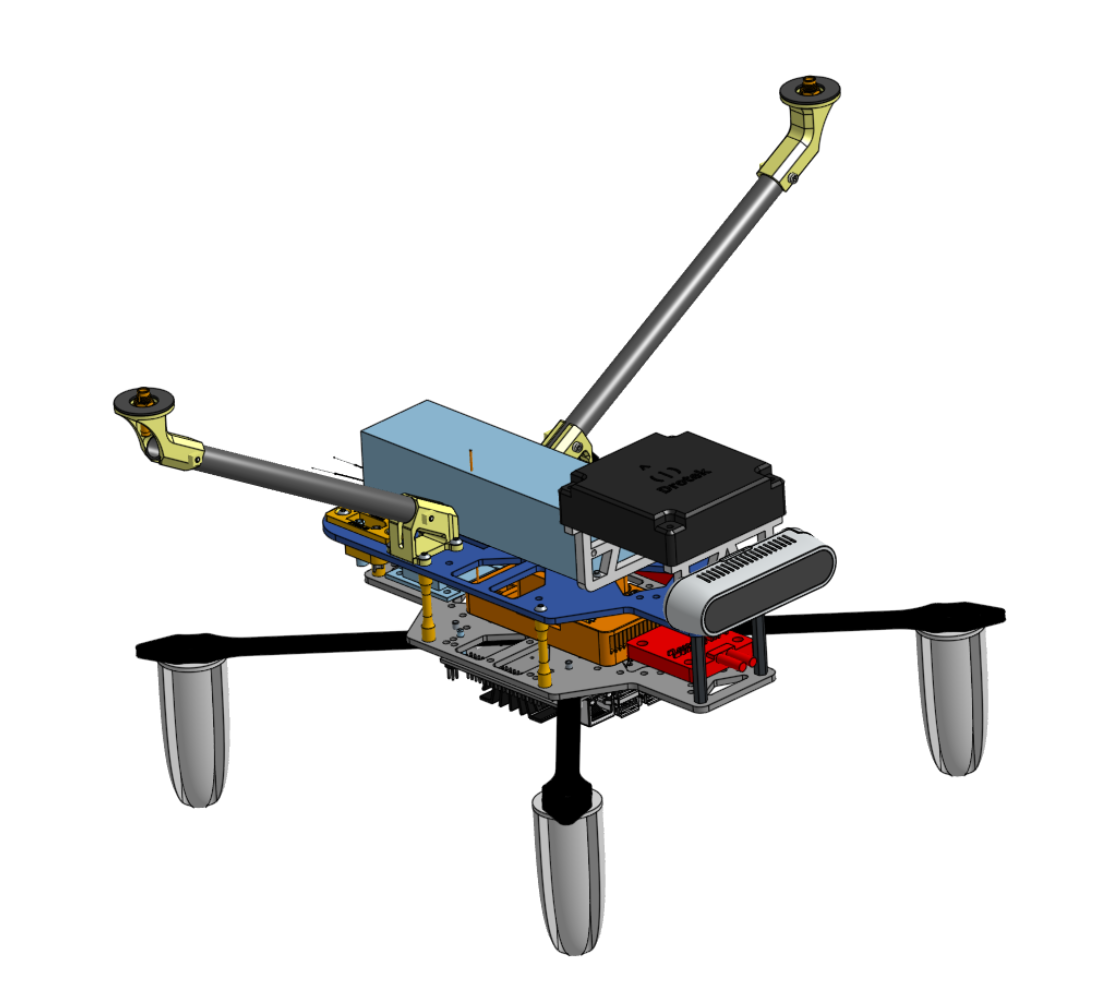
Si aucun ESC est disponible avec le firmware en AM32, le gipsa s’engage à fournir un ESC avec un bootloader flashé en AM32. Un premier aperçu du montage complet est disponible ici
Process
Le processus de fabrication est le suivant :
-
Impression de pièces sur mesure en TPU et PLA avec les liens ci-dessus
-
Découpe des plaques carbone
-
Réalisation des connectiques en suivant les spécifications de la section électronique
-
Assemblage des pièces suivant la notice de la section mécanique
-
Option - Configuration du système px4 pour une utilisation indoor ou outdoor
-
Option - Test de vol du dispositif en mode classique + RTK fixe